Основные виды электромагнитных реле
Главным назначением этих устройств является коммутация при больших токах нагрузки. Иначе говоря, они выполняют функции переключателей, которые посредством слабых токов включают цепи с большими токами. Если такую цепь включать напрямую без реле, то проводка и кнопка просто не выдержит высоких токов и расплавится. Реле принимает на себя большую токовую нагрузку и производит коммутацию с помощью мощных контактов.
Электромагнитные выключатели разделяются на две основные группы:
- Нейтральные реле имеют наиболее простую конструкцию. В его состав входит контактная и магнитная система. Каждая контактная группа включает в себя два неподвижных и один общий подвижный контакт. Магнитная система состоит из подвижного якоря, сердечника, обмотки и ярма.
- Поляризованное реле состоит из таких же систем. Однако в магнитной системе присутствует два сердечника с обмотками, а также контактная тяга и постоянный магнит.
В отличие от нейтральных, электромагнитные поляризованные устройства способны срабатывать в зависимости от полярности управляющего сигнала. Для изготовления сердечника используется электротехническая листовая сталь, что позволяет значительно увеличить быстроту действия прибора.
Использование поляризованного реле в автомобиле.
Материал от Максима с сайта: https://www.drive2.ru
Итак очередная полезная доработка минимальной сложности. При частых и не очень длинных поездках в течение дня приходится каждый раз выходя из машинки отключать габариты и магнитолу, а возвратившись – включать все обратно. Вот и задумался над задачей — как автоматизировать этот процесс, поручив его блоку автосигнализации, при этом предусмотрев блокировку отключения габаритов, когда это необходимо по соображениям безопасности на дороге.
Заранее прошу — комментарии, наподобие «А у меня магнитола замком зажигания отключается, и нафиг это все надо?» не писать, просто закройте эту страничку. Цель этой статьи, как и остальных в моем блоге – доступно описать подход и применяемую элементную базу в реализации задачи. Сразу оговорюсь, изложенное ниже применимо для охранных систем, имеющих дополнительные программируемые выходы (сервисные каналы). Например, у StarLine, Sheriff, Pantera и др. предусмотрено от 4 и более дополнительных каналов. В моем, достаточно бюджетном варианте Sheriff-ZX725 – 6 доп. каналов. Постепенно были задействованы 4 канала — упр. замком багажника; доводчик стекол, упр. магнитолой и габаритами, вежливый свет при снятии с охраны. . Если этих каналов нет – возможно подключение к дверным актуаторам ЦЗ, как вариант. Требования к доработке: — простота и повторяемость; — минимальный ток потребления (а еще лучше — его отсутствие!); — надежность; — низкая стоимость деталей. Если Вы, уважаемый читатель, полистаете форумы — найдете множество схем на обычных реле, подключенных к центрозамку, сигнализации (к каналам блокировки двигателя). Основной их недостаток – ток потребления реле во включенном состоянии, а это порядка 0,05-0,2А (в зависимости от типа). Получается следующее: реле под током либо при выключенной сигнализации, либо при включенной – в зависимости от конкретного схемного решения. А между тем, существует еще одна разновидность электромагнитного реле – поляризованное реле – достаточно интересное по своему функционалу и широко применяемое в средствах автоматики. Более подробно описано тут: electricalschool.info/spr…lektromagnitnye-rele.html
Итак: находим реле HFD2/012-M-L2-D, (HFD2/012-S-L2-D), RT314F12 или аналогичные, широко доступные в продаже. Стоимость (на сегодня) порядка 50 грн. / 100 руб. ($2,1). Ссылка на параметры: www.dart.ru/cataloguenew/…relays_hf/html/hfd2.shtml
Поляризованное реле
Кратко о теории. Поляризованное реле содержит две независимых обмотки и две группы (мех. связанных) переключающих контактов как у обычного реле. Принцип действия несколько отличается от обычного реле – для переключения контактных групп достаточно короткого, порядка 0,1с импульса., поданного на одну из обмоток. При подаче импульса на другую обмотку – контактные группы переключаются в противоположное состояние. Все предельно просто. Реле больше похоже на «ячейку памяти» — удерживает свое состояние без питания. Вот это очень привлекательно в данной задаче. Теперь о подключении.
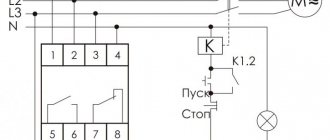
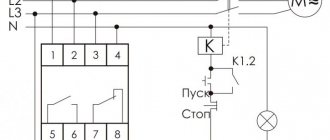
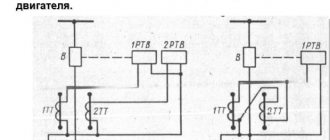
Программируем алгоритм работы дополнительных каналов. В различных охранных системах они называются по разному, потому назовем их условно «канал А, канал В». Канал А должен быть запрограммирован на появление отрицательного импульса (замыкание на массу от 0,5 с и более) при постановке авто на охрану, канал В – отрицательный импульс при снятии с охраны. Эти же каналы в моем случае используются для управления доводчиком стекол PWM-200. Схему можно собрать «навесным монтажом» припаяв провода к выводам, загнув их и поместив в термоусадку или разместить все на макетной плате с клеммами под винт. Диоды — защитные, можно и не устанавливать. Одну группу контактов используем для управления магнитолой ( в разрыв красного провода). Вторая группа контактов разрывает цепь габаритных огней, (в разрыв бело-черного провода) от выключателя габаритов. Кнопка с фиксацией SB1 — предназначена для блокировки отключения габаритов, например при парковке на проезжей части и др. случаи, на усмотрение водителя и по соображениям дорожной безопасности.
Тема 18. Нейтральные и поляризованные реле.
18>
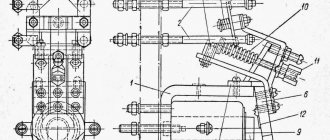
Кроме нейтральных реле типа РПН и РЭС – 14 применяются поляризованные реле. Они обладают высокой чувствительностью, большой скоростью срабатывания и управления токами двух направлений. Поляризованное реле (рис. 25 а) состоит из постоянного магнита 1,
полюсных наконечников 2, управляющих обмоток
3,
якоря
4
и контактных винтов 5. Магнитная цепь реле построена по дифференциальной (разветвленной) схеме. Постоянный магнит с полюсами
N
и S создает магнитные потоки
Ф1
и Ф2, проходящие через полюсные наконечники и воздушные промежутки
а1
и а2. Величины потоков Ф 1и Ф2 зависят от воздушных зазоров
а1
и
а2
соответственно: чем больше величина воздушного зазора, тем меньше значение магнитного потока. В левом положении якоря (см. рис. 25 а)
а1 <�а2,
следовательно, Ф1 >Ф2 и поэтому якорь реле будет притянут к левому полюсному наконечнику, а язычок якоря прижат к левому контактному винту.
Чтобы якорь перебросился к правому контакту, необходимо пропустить импульс тока через обмотки управления. При протекании тока через обмотки реле создается магнитный поток Фi, который проходит последовательно через оба воздушных зазора. Направление потока Фi-должно быть противоположно потоку Ф1 а его величина больше разности потоков Ф1—Ф2. При выполнении указанных условий якорь под воздействием потока Фi, будет переброшен к правому контактному винту. После выключения тока якорь остается притянутым к правому полюсному наконечнику, так как теперь воздушный зазор а1>а2
и, следовательно, Ф1< Ф2.
Таким образом, поляризованное реле имеет два источника магнитодвижущей силы, которые создают два магнитных потока: рабочий, создаваемый обмотками электромагнита, и поляризующий, созданный постоянным магнитом. Чтобы вернуть якорь реле обратно (к левому контактному винту), необходимо через обмотки реле пропустить импульс тока в другом направлении.
Основными параметрами поляризованного реле, определяющими качество его работы, являются:
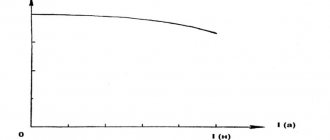
чувствительность, характеризуемая минимальным значением тока, при котором якорь реле перебрасывается в другое положение (ток срабатывания); время трогания якоря — время, в течение которого ток в обмотках реле нарастает от нуля до величины тока срабатывания.
Рисунок 25 – Конструкция поляризованного реле
Качество работы реле во многом зависит от его регулировки. Регулировка поляризованного реле заключается в установке воздушных зазоров b1
и
b2
между якорем и полюсными наконечниками (рис.
25 б).
Регулировка может быть проведена нейтрально или с преобладанием. Нейтральная регулировка характеризуется тем, что при пропускании через его обмотку одинаковых по продолжительности и амплитуде импульсов тока обоих направлений якорь замыкается с каждым контактом на одинаковое время. Как правило, поляризованные реле регулируют нейтрально. При этом расстояние
b 1
между полюсным наконечником и якорем при левом положении якоря и. соответствующее расстояние
b2
при правом положении якоря одинаковы. Силы, удерживающие якорь в одном и другом состояниях при отсутствии тока в обмотках, тоже одинаковы.
При регулировке с преобладанием расстояния b1
и
b2
выполняются неодинаковыми, что приводит к разным величинам токов срабатывания при переключении якоря из одного состояния в другое и наоборот. Регулировка расстояний
b1
и
b2
осуществляется с помощью контактных винтов 5. Проверка регулировки реле осуществляется с помощью специальных приборов ИП-5, ДИНИР и др.
Наибольшее распространение в приборах сельских АТС (для приема индуктивных сигналов в комплектах РСЛ) получили поляризованные реле следующих типов: ТРМ, РП-4 и РП-5 (малогабаритные). Последние обладают более высокой чувствительностью, чем реле ТРМ; реле РП-5 отличается от реле РП-4 тем, что в исходном состоянии его якорь находится в среднем положении, т. е. не касается контактных винтов.
18>
Дата добавления: 2020-06-09; просмотров: 120; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Узнать еще:
Плюсы и минусы
Как и у любого элемента, у реле есть свои преимущества и недостатки, тем не менее несмотря на минусы, в некоторых случаях без применения эти устройств просто не обойтись.
Плюсы
- Простая конструкция
- Легко ремонтируется, всегда можно разобрать чтобы подчистить контакты, заменить отдельные элементы
- Низкое сопротивление на контактах
Минусы
- Ограниченный ресурс, так как используются механические элементы
- Контакты иногда обгорают
- Низкая скорость при срабатывании в отличие от полупроводниковых элементов, механическое устройство в сто раз медленнее электронного, но при этом скорость срабатывания все равно достаточно велика
- Возможно дребезжание контактов при недостаточном напряжении на катушке
- Щелчки при переключении
Поляризованные электромагнитные реле
В отличие от рассмотренных ранее нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного усилия зависит от полярности сигнала постоянного тока в обмотке. Поляризация этих реле осуществляется при помощи постоянного магнита.
Существует много конструктивных разновидностей поляризованных реле, которые классифицируются по ряду признаков. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями, по числу обмоток управления — одно и многообмоточные, по способу настройки контактов (числу устойчивых положений якоря) — двух- и трехпозиционные.
Поляризованные реле могут быть использованы также в качестве вибропреобразователей, но наибольшее распространение они получили в маломощной автоматике, особенно в следящих системах при управлении реверсивными двигателями.
К числу достоинств поляризованных реле относятся: высокая чувствительность, которая характеризуется малой мощностью срабатывания и составляет 10-5 Вт; большой коэффициент управления; малое время срабатывания (единицы миллисекунд).
Недостатки по сравнению с нейтральными электромагнитными реле следующие: несколько сложнее конструкция; большие габаритные размеры, вес и стоимость.
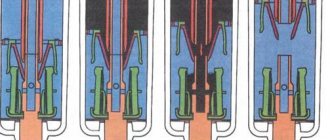
В поляризованных реле используют дифференциальные и мостовые схемы магнитных цепей, которые имеют много разновидностей (название цепей определяется типом электрической схемы замещения электромагнитной системы). На рис. 11.11 изображено поляризованное реле с дифференциальной схемой магнитной цепи.
На якорь реле действует два независимых друг от друга потока: поток Ф0(п), создаваемый постоянным магнитом 3
и не зависящий от рабочего состояния схемы, в которую включено реле, и рабочий (управляющий) поток Фэ(р), создаваемый намагничивающими катушками 1 и 1’ и зависящий от тока, протекающего по их обмоткам.
Электромагнитное усилие, действующее на якорь 4,
зависит, таким образом, от суммарного действия потоков Фэ(р) и Ф0(п). Изменение направления электромагнитного усилия при изменении полярности тока в рабочей обмотке происходит вследствие того, что изменяется направление рабочего потока относительно поляризующего.
Поляризующий поток Ф0(п) проходит по якорю и разветвляется на две части — Ф01 и Ф02 в соответствии с проводимостями воздушных зазоров слева δЛ и справа δпр от якоря. В зависимости от полярности управляющего сигнала рабочий поток Фэ(р) вычитается из потока Ф01 в зазоре слева от якоря и прибавляется к потоку Ф02 справа от якоря (как показано на рис. 11.11), или наоборот. В случае, показанном на рисунке, якорь перекинется из левого положения в правое. При выключении сигнала якорь будет находиться в том положении, которое он занимал до выключения сигнала. Таким образом, результирующее электромагнитное усилие, действующее на якорь, будет направлено в строну того зазора, где магнитные потоки суммируются.
В поляризованном реле с мостовой схемой магнитной цепи
(рис. 11.12) силы притяжения якоря, включенного в одну из диагоналей этой схемы, действуют так же, как и в дифференциальной схеме, т.е. в воздушном зазоре с одной стороны якоря рабочий поток Фэ(р) направлен согласно с поляризующим потоком Ф0(П), а с другой — встречно. Мостовые схемы поляризованных реле имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
Поляризованные реле выпускаются трех видов настройки. Реле, изображенное на рис. 11.11, является двухпозиционным. Если неподвижные контакты 5 и 5′ симметрично расположены относительно нейтральной линии (якорь отрегулирован симметрично), то при выключении управляющего сигнала якорь реле остается в том же положении, которое он занимал при наличии управляющего сигнала. Повторное включение управляющего сигнала прежней полярности не вызовет изменения положения якоря. Если изменить полярность управляющего сигнала, то якорь перебросится в другое положение и останется в нем после снятия сигнала. Такая настройка называется нейтральной или двухпозиционной.
Если (рис. 11.13, а)
один из контактов
1
или
2
выдвинут за нейтральную линию, то реле является двухпозиционным с преобладанием к одному из контактов. В этом случае при выключенном реле якорь всегда прижат к левому контакту
1
(к правому контакту
2,
если за нейтральную линию выдвинут левый контакт) и перебрасывается вправо лишь на время протекания в управляющей обмотке тока соответствующей полярности.
Трехпозиционное реле имеет симметрично расположенные от нейтральной линии неподвижные контакты (рис. 11.13, б).
Якорь при отсутствии управляющего сигнала удерживается в среднем положении с помощью специальных пружин, расположенных с двух сторон, или закрепляется на плоской пружине, упругость которой создает устойчивое положение равновесия в среднем положении. При подаче сигнала в управляющую обмотку контакт на якоре замыкается с левым или правым контактом (в зависимости от полярности сигнала) и возвращается в нейтральное положение после снятия сигнала.
Поляризованные реле находят широкое применение в схемах автоматики благодаря своим характерным особенностям. Наличие нескольких обмоток позволяет использовать их в качестве логических элементов, небольшая мощность срабатывания — в качестве элементов контроля небольших электрических сигналов, малое время срабатывания и чувствительность к полярности входных сигналов — в качестве амплитудных модуляторов и демодуляторов. Благодаря высокой чувствительности поляризованные реле часто используют в маломощных цепях переменного тока с включением через выпрямитель.
5. Герконы