Расчет реактивной мощности синхронного двигателя
В данном примере нужно определить реактивную мощность, которую генерирует синхронный двигатель серии СТМ-800-2 на напряжение 6 кВ мощностью 800 кВт.
Технические характеристики на двигатель принимаются согласно [Л1, с.204] либо по каталогу завода-изготовителя:
- Номинальная активная мощность на валу двигателя – Рн = 800 кВт;
- Коэффициент полезного действия (КПД) – ηн = 0,941;
- Коэффициент мощности – cosφн=0,9;
1. Определяем коэффициент реактивной мощности синхронного двигателя, зная значение cosϕн=0,9:
2. Определяем реактивную мощность синхронного двигателя по выражению 35 [Л2, с.55]:
3. Для прикидочных расчетов номинальную реактивную мощность синхронного двигателя можно, определить по выражению 36 [Л2, с.55]:
Qн = 0,5*Рн = 0,5*800 = 400 квар
Как видно из результатов расчета, значения не сильно отличаются.
Также хотел бы добавить, что при генерации реактивной мощности синхронными двигателями возникают активные потери.
4. Для прикидочных расчетов потери активной мощности при генерации реактивной мощности можно приближенно подсчитать, исходя из к.п.д. двигателя по выражению 39 [Л2, с.56]:
- Режимы работы, релейная защита и автоматика синхронных электродвигателей. М.И.Слодарж, 1977 г.
- Реактивная мощность (2-е издание) Минин Г.П. 1978 г.
Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» .
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
В данной статье речь пойдет о принципе действия и из каких составных частей состоит УЗО. Устройство.
Рассмотрим пример выбора выключателя в сети 6(10) кВ. В нашем случае, нужно выбрать элегазовый.
Требуется определить сечения кабеля в сети 0,4 кВ для питания электродвигателя типа АИР200М2 мощностью 37.
Для правильного выбора трансформаторов тока (ТТ) для расчетных счетчиков, нам нужно правильно выбрать.
В данное статье речь пойдет о расчете таких технических характеристик асинхронного электродвигателя.
Отправляя сообщение, Вы разрешаете сбор и обработку персональных данных. Политика конфиденциальности.
Источник
Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
Определение мощности электродвигателя по потребляемому току
Мощность двигателя можно определить по потребляемому им току. Для измерения силы тока будем использовать токоизмерительные клещи.
Перед началом измерений предварительно отключаем подачу напряжения на электродвигатель. После этого снимаем крышку с клеммной коробки и расправляем токопроводящие жилы, чтобы обеспечить удобный доступ к ним.
Затем подаем напряжение на двигатель и даем поработать в режиме номинальной нагрузки в течение нескольких минут. Устанавливаем предел измерений на значение «200 А» и токовыми клещами выполняем измерение потребляемого тока на одной из фаз. Далее замеряем напряжение на обмотках с помощью щупов, входящих в комплект токоизмерительных клещей.
Колесо выбора режимов и пределов измерений устанавливаем в позицию для измерения переменного напряжения с пределом в 750 В. Щуп красного цвета присоединяем к гнезду для измерения напряжения, сопротивления и силы тока до десяти Ампер, а черного – к гнезду «COM»
. Замеры выполняем между клеммами
«U1-V1»
или
«V1-W1»
или
«U1-W1»
.
Расчет мощности электродвигателя выполняем по формуле:
где S
– полная мощность (кВА), I – сила тока (А),
U
– значение линейного напряжения (кВ).
Замеряем ток на одной из фаз, а также напряжение и подставляем полученные значения в формулу (например, при замере мы получили ток равный 15,2А, а напряжение – 220В):
Важно отметить, что мощность эл. двигателя не зависит от схемы соединения обмоток статора. В этом можно убедиться, выполнив измерения на этом же двигателе, но с обмотками статора, соединенными по схеме «звезда»: измеренный ток будет равен 8,8А, напряжение – 380В. Также подставляем значения в формулу:
По этой формуле мы определили мощность электродвигателя, потребляемую из электрической сети.
Чтобы узнать мощность двигателя на валу, нужно полученное значение умножить на коэффициент мощности двигателя и на коэффициент его полезного действия. Таким образом, формула мощности двигателя выглядит так:
где P
– мощность двигателя на валу;
S
– полная мощность двигателя; сosφ – коэффициент мощности асинхронного электродвигателя;
η
– КПД двигателя.
Поскольку мы не располагаем точными данными, подставим в формулу средние значения cosφ и КПД двигателя:
Таким образом, мы определили мощность электродвигателя, которая равна 4 кВт.
Мы рассказали о самых надежных методах определения мощности электродвигателя. Вы также можете посмотреть наше видео, в котором подробно показано, как определить мощность электродвигателя.
Оригинал статьи размещен на нашем сайте
Если этот материал был для Вас полезным, ставьте «лайк»
и
поделитесь
статьей в социальных сетях!
А для того, чтобы не пропустить выход новых статей, подписывайтесь
на наш канал: Кабель.РФ: всё об электрике .
Источник
Достоинства и недостатки синхронных двигателей
Пуск синхронного двигателя
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения.
Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронный.
В настоящее время чаще всего применяют следующие способы пуска:
При этом способе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготавливают из латуни. После разгона ротора до частоты вращения, близкой к синхронной, на обмотку возбуждения подается напряжение и постоянный ток, проходящий по ней, создает синхронизирующий момент, который втягивает ротор в синхронизм.
2. Пуск при помощи вспомогательного двигателя.
Ротор возбужденного двигателя приводится во вращение до синхронной скорости и с помощью синхронизирующего устройства подключается к сети. После этого вспомогательный двигатель отключают.
В качестве пускового двигателя обычно используют асинхронный двигатель с числом полюсов на два меньше, чем у синхронного.
Недостатком данного способа является невозможность пуска двигателя под нагрузкой, так как нерационально иметь пусковой двигатель большой мощности.
При частотном пуске синхронного двигателя частота питающего напряжения плавно изменяется от нуля до номинальной. При этом ротор вращается синхронно с магнитным полем статора.
Недостатками частотного пуска являются высокая стоимость преобразователя частоты, а также необходимость реализации сложных законов регулирования исходного напряжения и частоты в процессе разгона двигателя. Частотный пуск синхронных двигателей применяется в приводах специальных установок.
Синхронные двигатели имеют следующие достоинства:
1. Возможность работы при cos φ=
1; это приводит к улучшению
cos φ
сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций.
2. Меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени, а не квадрату напряжения.
3. Строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатки синхронных двигателей:
1. Сложность конструкции.
2. Сравнительная сложность пуска в ход.
3. Трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100кВт.
Однако при более высоких мощностях, когда особенно важно иметь высокий cos φ
и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Мощность электродвигателя: формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Принцип действия синхронных машин
В основе принципа работы синхронной машины лежит взаимодействие двух типов магнитных полей. Одно из этих полей образуется якорем, другое же возникает вокруг возбуждаемого постоянным током электромагнита – индуктора. Непосредственно после выхода на рабочую мощность магнитное поле создаваемое статором и вращающееся внутри воздушной прослойки, сцепляется с магнитными полями на полюсах индуктора. Таким образом, для того чтобы синхронная машина достигла рабочей частоты вращения, требуется определенное время на ее разгон. После того как машина разгоняется до необходимой частоты, на индуктор подается питание от источника постоянного тока.
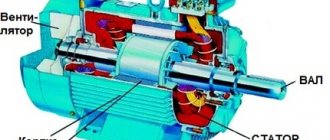
Конструкция электрического двигателя
Привод включает в себя:
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Строение асинхронного однофазного двигателя
Однофазный коллекторный двигатель переменного тока
Итак, мы вами в первой части статьи разобрали общие понятия об однофазных двигателях, принципе их работы и подключении. Такой информации хватило бы для поверхностного изучения, но нас такой подход не совсем устраивает. Для любителей технических подробностей, давайте разберем теперь все детальнее.
Асинхронный двигатель
Электрические моторы бывают синхронными и асинхронными. Разница между ними состоит в том, что в синхронном, скорость вращения якоря совпадает с вращением магнитного поля, а в асинхронном ротор несколько отстает.
- Последний вариант является самым распространенным, так как имеет более простую конструкцию и очень надежен. Синхронные применяются лишь в тех сферах, где очень важен контроль за оборотами двигателя.
- Вы уже, наверное, обратили внимание на то, что словом фаза называются разные понятия – и количество питающих проводов, и обмотки на статоре и сдвиг по углам. И мы даже сказали, что однофазные двигатели, фактически имеют две фазы, но называются они таковыми именно по количеству питающих проводов.
- Мы также писали, что мотор имеет подвижную и неподвижную части. Давайте разберем их строение подробнее.
Коллекторные электродвигатели переменного тока однофазные
- Ротор агрегата представляет собой вал, который держится в корпусе двигателя при помощи подшипников вращения. За счет них же он свободно крутится вокруг своей оси. Строение этого элемента будет отличаться в зависимости от того является двигатель коллекторным или бесколлекторным. Давайте начнем со второго.
- На валу бесколлекторного фазного ротора закреплен магнитопровод, который набирается из шихтованных стальных пластин.
- Снаружи магнитопровода имеются пазы, в которых находятся стержни обмоток – обычно из меди.
Двигатель с ротором фазного типа
- С концов стержни соединяются с кольцами, которые накоротко их замыкают – их называют замыкающими кольцами.
Строение фазного ротора
- Внутри данной обмотки будет течь ток, который индуктируется магнитным полем статора – никаких внешних подключений он не имеет.
- Магнитопровод служит для лучшего прохождения магнитного поля, которое создается в роторе.
- Для таких устройств характерна высокая надежность, так как они не имеют трущихся деталей. Управление скоростью вращения двигателя осуществляется только за счет тока на основной обмотке статора.
- Коллекторный двигатель переменного тока однофазный по своему строению мало чем отличается от ротора двигателя постоянного тока. Собственно, такие двигатели являются универсальными и могут запитываться как переменным, так и постоянным током.
- Фазы ротора подключаются к питающей сети через коллектор, который контактирует со щетками, которые в свою очередь уже соединяются с питающей цепью.
- Строение таких двигателей более сложное, также их надежность будет ниже, но они являются более гибкими в управлении.
На фото – статор электродвигателя
- Статор является пассивной частью электромотора – он неподвижен и состоит из магнитопровода и обмотки.
- Назначение этого элемента – генерирование неподвижного или вращающегося магнитного поля.
- У однофазного двигателя от статора будет отходить четыре вывода – два для рабочей обмотки и два для пусковой. Как их отличить мы уже писали.
Помимо этих элементов двигатели имеют следующие составляющие:
- Станина и корпус устройства, которые удерживают в себе все рабочие части и позволяют закрепить устройство на поверхности;
- Внешняя электрическая цепь – кнопка включения, устройство регулировки оборотов, провода и устройства для шунтирования дополнительной обмотки;
- Крыльчатка – активное охлаждение двигателя, располагается также на валу;
- Подшипники вращения.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Принцип работы
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье “Трехфазный асинхронный электродвигатель”.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
Однако для линейных значений напряжения и тока она выглядит как
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Пуск синхронного двигателя
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
Д
ля осуществления пуска необходимо, чтобы число пар полюсов асинхронного двигателя было меньше числа пар полюсов синхронного двигателя, ибо при этих условиях вспомогательный асинхронный двигатель может развернуть ротор синхронного двигателя до синхронной скорости.
Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать так же, как и при включении синхронного генератора на параллельную работу. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3
П
ри включении напряжения трехфазной сети в обмотку статора 4 синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи.
Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора.
В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности. Существуют также схемы автоматического асинхронного пуска синхронных двигателей
Источник
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M — крутящий момент, Нм;
F — прикладываемая сила, H;
Для расчета номинального вращающего момента привода используют формулу
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин -1 .
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
УГЛОВАЯ И МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ СИНХРОННОГО ДВИГАТЕЛЯ
Для синхронного двигателя можно написать такие же по виду выражения мощностей, как и для синхронного генератора. Однако применительно к двигателю они будут иметь иные значения.
У двигателя P
φ = 3
UI
cos φ представляет собой мощность, потребляемую им из трехфазной сети. Вычитая из этой мощности потери мощности в обмотке якоря, получаем электромагнитную мощность, т. е. мощность, преобразуемую из электрической в механическую, развиваемую вращающимся ротором:
P
эм =
P
ψ — Δ
Р
я = 3
UI
cos φ —
3I
2
r =
3
E
0
I
cos ψ.
Электромагнитный момент синхронного двигателя может быть выражен через мощность Р
эм и угловую скорость ω = π
n
/30 ротора:
М
=
Р
эм/ω.
Заменив мощность Р
эм ее выражением, получим
| M = | 3E 0 I cos φ | . |
| ω |
(11,13)
Если из точки А векторной диаграммы (рис. 11.9, а) опустить перпендикуляр АГ на линию ОВ, то можно получить следующее равенство:
I
cos ψ =
U
sin θ/
x
c .
Заменив I
cos ψ в (11.13) его выражением, получим
| M = | 3E 0 U | sin θ. |
| ωх с |
(11,14)
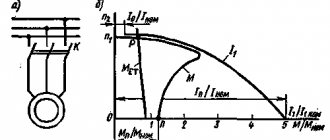
Как видно, при постоянных значениях U, Е,
ω и
х
с момент двигателя прямо пропорционален sin θ. Зависимость
М
(θ) называется угловой характеристикой синхронного двигателя и приведена на рис. 11.10 в первом квадранте.
В пределах от θ = 0 до θ = 90° расположена устойчивая часть характеристики, называемая так потому, что именно здесь возможна устойчивая работа двигателя с различными моментами сопротивления. Любое изменение момента сопротивления М
с при работе на устойчивой части характеристики приводит к такому изменению момента двигателя
М,
при котором неизбежно наступает равенство моментов
М
и
М
с . На устойчивой части характеристики расположена точка
А,
соответствующая номинальному режиму работы. При номинальном режиме θном = 20 ÷ 30°.
Максимальный момент, который в состоянии развивать двигатель, наступает при θ = 90°:
| Mmax = | 3UE 0 | . |
| ωх с |
Если момент сопротивления М
с окажется больше момента
Мmax,
то двигатель не в состоянии будет его уравновесить и остановится.
Отношение Мmax
/
М
ном называется перегрузочной способностью двигателя и для различных двигателей лежит в пределах 2 — 3,2.
Перегрузочная способность может быть при необходимости увеличена за счет повышения ЭДС Е
0. Из выражения максимального момента следует, что последний и, следовательно, перегрузочная способность синхронного двигателя пропорциональны первой степени напряжения в отличие от асинхронного двигателя, у которого она пропорциональна квадрату напряжения. Из этого следует, что синхронные двигатели менее чувствительны к изменению напряжения, чем асинхронные.
Следует обратить внимание на то, что длительная нагрузка двигателей, превышающая номинальную, недопустима, так как двигатель при этом будет перегреваться. Возможная кратковременная перегрузка должна быть учтена при выборе двигателя по мощности.
Рис. 11.10. Угловая характеристика синхронного двигателя
Рис. 11.11. Механическая характеристика синхронного двигателя
Рассмотрим явления, происходящие при изменении нагрузки двигателя. Допустим, что двигатель работает с моментом М = Мс и углом θ (см. рис. 11.10), чему соответствует векторная диаграмма, изображенная на рис. 11.9, а. В результате изменения момента сопротивления, например, от Мс до Мс > Мс происходит кратковременное снижение частоты вращения ротора, что сопровождается соответствующим изменением частоты индуктированной ЭДС Е0 и, следовательно, частоты вращения вектора ЭДС Е0 на векторной диаграмме. В результате этого возратает угол сдвига фаз θ ЭДС Е0 относительно напряжения U и как следствие увеличиваются ток I, падение напряжения Iхc , момент Ми мощности Рφ и Рэм .
Перечисленные величины возрастают до тех пор, пока при некотором угле θ1 (см. рис 11.9, б и 11.10) момент двигателя М1 не сравняется с моментом сопротивленияМс1. При М1 = Мс1 частота вращения ротора снова станет равной частоте вращения поля якоря:
n= n0 = 60f/р.
При уменьшении момента сопротивления угол θ и, следовательно, значения I, Iхc , М, Pφ и Рэм также уменьшаются, а при θ = 0 все они, кроме I и Iхс , оказываются равными нулю. Векторная диаграмма для случая θ = 0 дана на рис. 11.9, вКак видно, при θ = 0 двигатель потребляет чисто индуктивный ток. Нетрудно установить, что если бы двигатель был возбужден до ЭДС E0 = U,то при θ = 0 токI был бы равен нулю.
Так как при изменении нагрузки двигателя происходит лишь относительно небольшое смещение ротора относительно вращающегося поля (изменение угла θ), то механическая характеристика синхронного двигателя представляется линией, параллельной оси абсцисс (рис. 11.11). Двигатель имеет постоянную частоту вращения при изменении момента вплоть до максимального значения.
Синхронные двигатели могут работать кроме двигательного режима в тормозном генераторном режиме с отдачей энергии в сеть. Генераторный режим возникает в том случае, если к валу двигателя приложить не тормозящий, а вращающий момент. Двигатель в генераторном режиме представляет собой по существу генератор, работающий параллельно с сетью. Угловая и механическая характеристики двигателя в генераторном режиме приведены соответственно на рис. 11.10 и 11.11 в третьем и втором квадрантах.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega), где
omega — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
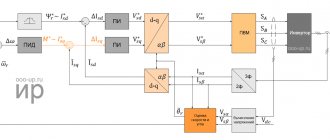
Что такое тиристорные возбудители и для чего они нужны?
Что такое тиристорные возбудители синхронных двигателей, как они работают и где применяются. Виды тиристорных возбудителей и режимы работы.
Электронные устройства управления возбуждением широко применяются в промышленности. Они необходимы для подачи напряжения на обмотку возбуждения и управления. Предусмотрены для регулировки в автоматическом режиме токов возбуждения при прямом или реакторном пуске от частотного преобразователя или сети. Реализует стабильную работу в режиме синхронной и аварийной работы мощных синхронных электродвигателей. Достоинствами таких систем являются простота управления, компактность, интеграция в системы электронного регулирования в автоматических системах управления, где применяется дистанционное изменение параметров. Далее мы подробно расскажем о том, что такое тиристорные возбудители, каких видов они бывают и как работают.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = P мех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.