Классификация методов векторного управления
Начиная с семидесятых годов двадцатого века было предложено множество способов управления моментом. Не все из них нашли широкое применение в промышленности. Поэтому, в данной статье рассматриваются только самые популярные методы управления. Обсуждаемые методы контроля момента представлены для систем управления асинхронными двигателями и синхронными двигателями с постоянными магнитами с синусоидальной обратной ЭДС.
Существующие методы управления моментом могут быть классифицированы различным способом.
- Чаще всего методы управления моментом разделяют на следующие группы:
- линейные (ПИ, ПИД) регуляторы;
- нелинейные (гистерезисные) регуляторы.
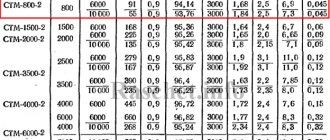
| Метод управления | Диапазон регулирования скорости | Погрешность скорости3, % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | ||
| Скалярный | 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | ||
| Векторный | Линейный | Полеориентированное управление | >1:2002 | 0 | Высокий | Высокая | Позволяет плавно и быстро управлять основными параметрами двигателя — моментом и скоростью. Для работы данного метода требуется информация о положении ротора. | |
| Прямое управление моментом с ПВМ | >1:2002 | 0 | Высокий | Высокая | Гибридный метод, разработанный для того чтобы объединить преимущества ПОУ и ПУМ. | |||
| Нелинейный | Прямое управление моментом с таблицей включения | >1:2002 | 0 | Высокий | Высокая | Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. | ||
| Прямое самоуправление | >1:2002 | 0 | Высокий | Высокая | Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. | |||
Характеристики основных способов управления электродвигателями переменного тока [2]
Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Среди векторного управления наиболее широко используются полеориентированное управление (FOC — field oriented control) и прямое управление моментом (DTC — direct torque control).
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
Источник
Линейные регуляторы момента
Линейные регуляторы момента работают вместе с широтно-импульсной модуляцией (ШИМ) напряжения. Регуляторы определяют требуемый вектор напряжения статора усредненный за период дискретизации. Вектор напряжения окончательно синтезируется методом ШИМ, в большинстве случаев используется пространственно векторная модуляция (ПВМ). В отличие от нелинейных схем управления моментом, где сигналы обрабатываются по мгновенным значениям, в линейных схемах контроля момента, линейный регулятор (ПИ) работает с значениями усредненными за период дискретизации. Поэтому частота выборки может быть уменьшена с 40 кГц у нелинейных регуляторов момента до 2-5 кГц в схемах линейных регуляторов момента.
- К группе линейных регуляторов относят следующие методы управления моментом:
- полеориентированное управление (ПОУ, англ. field oriented control, FOC);
- прямое управление моментом с пространственно векторной модуляцией напряжения (ПУМ-ПВМ, англ. direct torque control with voltage space vector modulation, DTC-SVM);
- прямое управление моментом с пространственно векторной модуляцией потока (ПУМ-ПВМП, англ. direct torque control with flux vector modulation, DTC-FVM).
Полеориентированное управление
Полеориентированное управление
(ПОУ, англ. field oriented control, FOC) — метод регулирования, который управляет бесщеточным электродвигателем переменного тока (СДПМ, АДКР), как машиной постоянного тока с независимым возбуждением, подразумевая, что поле и момент могут контролироваться отдельно.
Полеориентированное управление, предложенное в 1970 году Блашке [3] и Хассе [4] основано на аналогии с механически коммутируемым коллекторным двигателем постоянного тока с независимым возбуждением. В этом двигателе разделены обмотки возбуждения и якоря, потокосцепление контролируется током возбуждения индуктора, а момент независимо управляется регулировкой тока якоря. Таким образом, токи потокосцепления и момента электрически и магнитно разделены.
Общая функциональная схема бездатчикового полеориентированного управления1
Примечание:
- Схема приведена в упрощенном виде. Подробная схема бездатчикового полеориентированного управления СДПМ с ротором с явно выраженными полюсами.
С другой стороны бесщеточные электродвигатели переменного тока (АДКР, СДПМ) чаще всего имеют трехфазную обмотку статора, и вектор тока статора Is используется для контроля и потокосцепления и момента. Таким образом, ток возбуждения и ток якоря объединены
в вектор тока статора и не могут контролироваться раздельно. Разъединение может быть достигнуто математически — разложением мгновенного значения вектора тока статора Is на две компоненты: продольную составляющую тока статора Isd (создающую поле) и поперечную составляющую тока статора Isq (создающую момент) во вращающейся dq системе координат ориентированной по полю ротора (R-FOC – rotor flux-oriented control) — рисунок выше. Таким образом, управление бесщеточным двигателем переменного тока становится идентичным управлению КДПТ с независимым возбуждением и может быть осуществлено используя инвертер ШИМ с линейным ПИ регулятором и пространственно-векторной модуляцией напряжения.
В полеориентированном управлении момент и поле контролируются косвенно посредством управления составляющими вектора тока статора.
Мгновенные значения токов статора преобразовываются к dq вращающейся системе координат с помощью преобразования Парка αβ/dq, для выполнения которого также требуется информации о положении ротора. Поле контролируется через продольную составляющую тока Isd, в то время как момент контролируется через поперечную составляющую тока Isq. Обратное преобразование Парка (dq/αβ), математический модуль преобразования координат, позволяет вычислить опорные составляющие вектора напряжения Vsα* и Vsβ*.
Формы сигналов на разных этапах преобразования
Для определения положения ротора используется либо датчик положения ротора установленный в электродвигателе либо реализованный в системе управления бездатчиковый алгоритм управления, который вычисляет информацию о положении ротора в режиме реального времени на основании тех данных, которые имеются в системе управления.
Прямое управление моментом с пространственно векторной модуляцией
- Прямое управление моментом с пространственно векторной модуляцией напряжения
- Прямое управление моментом с пространственно векторной модуляцией потока
Прямое управление моментом с пространственно векторной модуляцией осуществляется в прямоугольной системе координат ориентированной по полю статора, следовательно для данного управления не требуется информация о положении ротора.
В частности данный метод реализует бездатчиковое управление синхронным электродвигателем с постоянными магнитами во всем диопазоне скоростей, включая низкую скорость, без необходимости накладывать высокочастотный сигнал и изменять конструкцию ротора, как это делается в бездатчиковом полеориентированном управлении электродвигателем с постоянными магнитами.
Прямое управление моментом с пространственно векторной модуляцией напряжения
Блок-схема прямого управления моментом с пространственно векторной модуляцией с регулировкой момента и потокосцепления с обратной связью работающей в прямоугольной системе координат ориентированной по полю статора представлена на рисунке ниже. Выходы ПИ регуляторов момента и потокосцепления интерпретируются как опорные составляющие напряжения статора Vψ* и VM* в системе координат dq ориентированной по полю статора (англ. stator flux-oriented control, S-FOC). Эти команды (постоянные напряжения) затем преобразуются в неподвижную систему координат αβ, после чего управляющие значения Vsα* и Vsβ* поступают на модуль пространственно векторной модуляции.
Функциональная схема прямого управления моментом с пространственно векторной модуляцией напряжения
Обратите внимание, что данная схема может рассматриваться как упрощенное управление ориентированное по полю статора (S-FOC) без контура управления током или как классическая схема прямого управления моментом с таблицей включения (ПУМ-ТВ, англ. switching table DTC, ST DTC) в которой таблица включения заменена модулятором (ПВМ), а гистерезисный регулятор момента и потока заменены линейными ПИ регуляторами.
В схеме прямого управления моментом с пространственно векторной модуляцией (ПУМ-ПВМ) момент и потокосцепление напрямую управляются в замкнутом контуре, поэтому необходима точная оценка потока и момента двигателя. В отличии от классического алгоритма гистерезисного прямого управления моментом, ПУМ-ПВМ работает на постоянной частоте переключения. Это значительно повышает характеристики системы управления: уменьшает пульсации момента и потока, позволяет уверенно запускать двигатель и работать на низких оборотах. Но при этом снижаются динамические характеристики привода.
Прямое управление моментом с пространственно векторной модуляцией потока
Прямое управление моментом с пространственно векторной модуляцией потока представляет собой упрощенный вариант схемы прямого управления моментом с пространственно векторной модуляцией напряжения. В данном случае при управлении не осуществляется преобразование из неподвижной системы координат во вращающуюся (αβ -> dq).
Функциональная схема прямого управления моментом с пространственно векторной модуляцией потока
Для управления моментом электродвигателя используется ПИ регулятор контролирующий приращение угла крутящего момента Δδ при заданном изменении крутящего момента ΔM на входе. Использование ПИ регулятора обусловлено тем, что связь между изменением крутящего момента ΔM и приращением угла крутящего момента Δδ сложна и нелинейна [7]. Затем приращение угла момента Δδ добовляется к углу вектора потока статора θs в прямоугольной системе координат ориентированной по полю статора α, β, чтобы вычислить управляющий вектор потока статора ψs*. Полученное значение управляющего вектора потока статора сравнивается с оцененным потоком после чего полученная разница Δψs используется блоком ПВМП для рассчета управляющего вектора напряжения статора и вычисления состояний включения ключей инвертора [8]. В данной схеме благодаря наличию цикла управления потоком статора используемого для вычисления Δψs, использование ПИ регулятора потока не требуется.
Строим структуру векторного управления
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α
и
β
. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение. Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад
– некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы
Uα
. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это
Uα
. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение
iα_зад
, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад
и
iβ_зад
будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управления не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ
, а БКП_2 на —
ϴ
. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей
α
и
β
, привязанных к статору двигателя, к вращающимся осям
d
и
q
, привязанных к ротору двигателя (используя для этого угол положения ротора
ϴ
). А БКП_1 делает обратное преобразование, от задания напряжения по осям
d
и
q
делает переход к осям
α
и
β
. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d
и
q
, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d
,
q
и выходы регуляторов в установившемся режиме постоянны. Оси
d
и
q
вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси
q
регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток
d
сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для объяснения «на пальцах» можно привести какую-нибудь аналогию.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q
пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси
q
, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω
взята из обработчика датчика положения ротора, так как
ω
это производная от углового положения
ϴ
. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is
, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, это делает блок фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
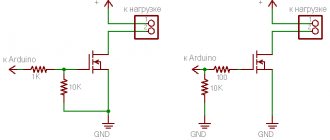
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё еще в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
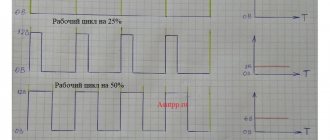
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Векторная ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Нелинейные регуляторы момента
Представленная группа регуляторов момента отходит от идеи преобразования координат и управления по аналогии с коллекторным двигателем постоянного тока, являющегося основой для полеориентированного управления. Нелинейные регуляторы предлагают заменить раздельное управление на непрерывное (гистерезисное) управление, которое соответствует идеологии работы (включено-выключено) полупроводниковых устройств инвертора.
В сравнении с полеориентированным управлением схемы прямого управления моментом имеют следующие характеристики:
- Преимущества:
- простая схема управления;
- отсутствуют контуры тока и прямое регулирование тока;
- не требуется преобразование координат;
- отсутствует отдельная модуляция напряжения;
- датчик положения не требуется ;
- хорошая динамика.
- Недостатки:
- требуется точная оценка вектора магнитного потокосцепления статора и момента;
- сильные пульсации момента и тока из-за нелинейного (гистерезисного) регулятора и переменной частоты переключения ключей;
- шум с широким спектром из-за переменной частоты переключения.
- К группе нелинейных регуляторов момента относят:
- прямое управление моментом с таблицей включения (ПУМ);
- прямое самоуправление (ПСУ);
- адаптивное прямое управление моментом;
- нейронные сети;
- регуляторы с нечеткой логикой.
Прямое управление моментом
Впервые метод прямого управления моментом с таблицей включения был описан Такахаси и Ногучи в статье IEEJ представленной в сентябре 1984 года и позже в статье IEEE опубликованной в сентябре 1986 года [5]. Схема классического метода прямого управления моментом (ПУМ) на много проще, чем у метода управления по полю (ПОУ), так как не требуется преобразования систем координат и измерения положения ротора. Схема метода прямого управления моментом (рисунок ниже) содержит оценщик момента и потокосцепления статора, гистерезисные компараторы момента и потокосцепления, таблицу включения и инвертор.
Принцип метода прямого управления моментом
заключается в выборе вектора напряжения для одновременного управления и моментом и потокосцеплением статора. Измеренные токи статора и напряжение инвертора используются для оценки потокосцепления и момента. Оцененные значения потокосцепления статора и момента сравниваются с управляющими сигналами потокосцепления статора ψs* и момента двигателя M* соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора полученного исходя из его углового положения . Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.
Классическая схема прямого управления моментом с таблицей включения с датчиком скорости
- Характерные черты схемы ПУМ-ТВ:
- синусоидальные формы потокосцепления и токов статора с коэффициентом гармоник определяемым зоной гистерезиса (зоной нечувствительности) регуляторов потокосцепления и момента;
- отличная динамика момента;
- зоны гистерезиса потокосцепления и момента определяют частоту переключения инвертора, которая изменяется с изменением синхронной скорости и изменением нагрузки [2].
Имеется множество вариаций классической схемы ПУМ-ТВ нацеленых на улучшение пуска, условий перегрузки, работы на очень низких скоростях, уменьшение пульсаций момента, работу на переменной частоте переключения и уменьшение уровня шумов.
Недостатком классического метода прямого управления моментом является наличие высоких пульсаций тока и момента в установившемся состоянии. Проблема устраняется повышением рабочей частоты инвертора выше 40кГц, что увеличивает общую стоимость системы управления [1].
Прямое сомоуправление
Заявка на патент метода прямого самоуправления была подана Депенброком в октябре 1984 года [6]. Блок схема прямого самоуправления показана ниже.
Основываясь на командах потокосцепления статора ψs* и текущих фазовых составляющих ψsA, ψsB и ψsC компараторы потокосцепления генерируют цифровые сигналы dA, dB и dC, которые соответствуют активным состояниям напряжений (V1 – V6). Гистерезисный регулятор момента имеет на выходе сигнал dM, который определяет нулевые состояния. Таким образом, регулятор потокосцепления статора задает отрезок времени активных состояний напряжений, которые перемещают вектор потокосцепления статора по заданной траектории, а регулятор момента определяет отрезок времени нулевых состояний напряжений, которые поддерживают момент электродвигателя в определенном гистерезисом поле допуска.
Схема прямого самоуправления
- Характерными особенностями схемы прямого самоуправления являются:
- несинусоидальные формы потокосцепления и тока статора;
- вектор потокосцепления статора перемещается по шестиугольной траектории;
- нет запаса по напряжению питания, возможности инвертора используются полностью;
- частота переключения инвертора ниже чем у прямого управления моментом с таблицей включения;
- отличная динамика в диапазонах постоянного и ослабленного поля.
Заметьте, что работа метода прямого самоуправления может быть воспроизведена с помощью схемы ПУМ-ТВ при ширине гистерезиса потока 14%.
- Cristian Busca. Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.: Aalborg universitet, 2010
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon. High-Performance Motor Drives: IEEE Industrial Electronics, vol. 5, no. 3, pp. 6-26, Sep.2011
- F. Blaschke. The principle of field-orientation as applied to the transvector closed loop control system for rotating-field machines: Siemens Rev., vol. 34, no. 1, pp. 217–220, 1972.
- K. Hasse. Drehzahlgelverfahren fur schnelle Umkehrantriebe mit strom-richtergespeisten Asynchron-Kurzchlusslaufermotoren: Reglungstechnik, vol. 20, no. 2, pp. 60–66, 1972.
- I. Takahashi, and T. Noguchi. A new quick response and high-efficiency control strategy of an induction motor: IEEE Trans. Ind. Applicat., vol. IA-22, no. 5, pp. 820–827, Sept./Oct. 1986.
- M. Depenbrock. Direct self control of the flux and rotary moment of a rotary-field machine: US4678248, 1987.
- L. Xu, and M. Fu. A sensorless direct torque control technique for permanent magnet synchronous motors: IEEE Industry Applications Conference, 1999
- G. S. Buja and M. P. Kazmierkowski. Direct torque control of PWM inverter-fed AC motors — A survey: IEEE Trans. Ind. Electron, 2004
Библиографический список
Различия скалярного и векторного методов управления
Техническим стандартом, по которому можно классифицировать современные преобразователи частоты (иначе, частотники или ПЧ, как их сокращенно называют) является метод управления, применяемый в этих устройствах при регулировании скорости вращения двигателя.
Методы управления подразделяются на:
- скалярный метод управления
- векторный метод управления
О различии скалярного и векторного управления электроприводом можно догадаться уже по их названию.
- Скалярный метод
основан на поддержании постоянства отношения (U/f) в рабочих диапазонах скоростей, в процессе которого ведется контроль, как видно из формулы, только за величиной питающего напряжения и его частотой. - При векторном методе управления
ведется контроль не только за величиной и частотой, но и за фазой питающего напряжения. Иначе говоря, контролируется угол и величина так называемого пространственного вектора, который вращается с частотой поля двигателя.
Скалярное управление наиболее применимо в электроприводах небольшой сложности в силу относительной простоты и минимального набора требуемых для работы функциональных параметров. Подходит для применений, где требуется поддерживать постоянство (с ограниченным диапазоном и точностью, по сравнению с векторным) определенной технологической величины, и где отсутствуют большие динамические нагрузки.
Векторный метод управления относительно скалярного имеет бóльшую производительность, диапазон и точность регулирования, в том числе на малых оборотах двигателя, чем перекрывает практически все недостатки скалярного принципа управления.
Тот или иной метод управления выбирается в зависимости от требований, которые заданы для технологического процесса – это глубина и точность регулирования, необходимость управления моментом на валу двигателя, состояние привода при переходных процессах – при пуске/стопе, ускорении, торможении.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.