Механическая характеристика — электропривод
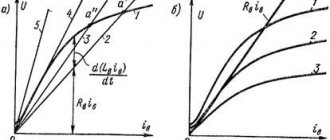
Механическая характеристика электропривода при динамическом торможении имеет явно выраженный максимум, определяемый координатами максимального момента Жм и максимального скольжения su, соответствующего этому моменту.
Механическая характеристика электропривода является типовой для электроприводов с подчиненным регулированием. В зоне рабочих нагрузок электропривода, когда регулятор скорости AR работает на линейном участке своей статической характеристики, электропривод поддерживает заданную скорость вращения. При перегрузках электропривода регулятор скорости насыщается и происходит ограничение тока статорных обмоток и момента двигателя.
Механическая характеристика электроприводов подъема экскаватора для одного из положений сельсииного командоаппарата приведена на рис. 3 — 29 в. Системы управления обеспечивают надежное стопорение электропривода и возможность получения характеристик любой жесткости, что соответствует требованиям различных механизмов экскаваторов.
Если механическая характеристика электропривода не соответствует характеристике механизма, происходит завышение номинальной мощности, и, следовательно, увеличиваются массы, габаритные размеры и стоимость двигателя.
Жесткость механических характеристик электропривода обеспечивается наличием обратных связей по току и напряжению. При минимальной скорости вращения обратная связь по току максимальна, а по мере увеличения скорости вращения она ослабляется. Так как к работе привода предъявляются повышенные требования в отношении жесткости механических характеристик, в схеме применено стабилизированное питание.
| Графическое определение — .| Механические характеристики асинхронного двигателя МТН 312 — 6 при изменении напряжения питания ( ПВ 40 %. |
Расчеты механических характеристик электроприводов и сопротивлений резисторов
| Схемы двухтокового питания. |
Получение механических характеристик электроприводов постоянного и переменного тока при параметрическом регулировании достигается за счет введения сопротивлений в цепи обмоток двигателей. Для крановых электроприводов практическое применение имеют схемы с использованием только активных сопротивлений.
| Нагрузочная диаграмма электропривода. |
Нарисовать механическую характеристику электропривода, когда задан полный сигнал задания вперед, а момент статической нагрузки изменяется от ММАХ до — ММАХ — Нарисовать внешнюю характеристику En f ( M) в тех же квадрантах.
Построить механическую характеристику электропривода, когда момент упора My 2 — Мн, а скорость холостого хода соответствует частоте напряжения на статоре 10 Гц.
Возможно формирование практически любых механических характеристик электропривода, вплоть до характеристик, аналогичных глубокорегулируемому реверсивному электроприводу постоянного тока с обратной связью по скорости.
| Статические характеристики асинхронного электропривода. |
Формирование горизонтального участка механической характеристики электропривода осуществляется в контуре регулирования скорости путем изменения величины сигнала L / PC в функции ошибки ( то есть разницы напряжений задатчи-ка ЗИ и датчика скорости ДС) по скорости. Этот режим возможен, когда регулятор скорости работает на линейном участке своей статической характеристики, то есть напряжение на его выходе меньше напряжения, задаваемого блоком ограничения БО.
Характеристики электродвигателей
Правильный выбор электродвигателя для производственного механизма – залог его нормальной и экономичной работы. Если электродвигатель подобран правильно, это упростит систему управления электроприводом и возможно удешевит стоимость электропривода. Как известно электропривод должен обеспечивать не только постоянство установившихся значений (скорость, момент), но и динамических (переходных процессов, таких как ускорение, тормозной момент, пусковой момент и т.д.).
Основным критерием для подбора электродвигателей используют зависимость, на которой отображают значение момента М электродвигателя и скорости вращения вала n при действии этого момента. Такая зависимость имеет название механическая характеристика n=f(M). По механическим характеристикам производят анализ электромеханических свойств двигателя, а также оценивают целесообразность применения его для различного рода механизмов и устройств. Они могут быть двух видов: естественные и искусственные.
Естественные механические характеристики: они снимаются при влиянии на двигатель номинальных параметров (номинальный ток, сопротивление обмоток, напряжение, момент сопротивления и т.д.). То есть двигатель подключается к источнику питания без каких-либо преобразовательных устройств – прямым включением.
Искусственные механические характеристики: их снимают при введении в цепь двигателя дополнительных элементов (резистор добавочный) или при пониженном напряжении питания, частоте (если двигатель переменного напряжения) и т.д. То есть на механическую характеристику двигателя производят искусственное влияние.
Также различают механические характеристики по изменению скорости вращения вала в зависимости от увеличения момента. Они оцениваются по жесткости:
и крутизне наклона:
Чтоб определить жесткость механической характеристики необходимо знать изменение скорости и момента на заданном участке зависимости n=f(M). Соответственно все расчеты жесткости ведутся либо в процентах, либо в относительных единицах.
Также механические характеристики можно отсортировать по группам:
- Абсолютно жесткая – при изменении момента нагрузки, скорость вращения вала остается неизменной. Как пример – характеристика синхронной машины.
- Жесткая – когда скорость уменьшается немного при увеличении момента нагрузки. Как пример, двигатели постоянного тока независимого возбуждения ДПТ НВ или линейная часть характеристики асинхронного двигателя.
- Мягкая – при увеличении момента нагрузки изменения в скорости вращения довольно существенные. К таким относят двигатели постоянного тока последовательного возбуждения ДПТ ПВ.
Ниже приведен график различных механических характеристик электродвигателей:
- – это абсолютно жесткая синхронной машины
- – жесткая ДПТ НВ
- — мягкая ДПТ ПВ
- – мягкая ДПТ смешанного возбуждения
- – асинхронного двигателя
Подбор электродвигателя определяется требованиями производственных механизмов. В таком производстве как прокатка металла, изготовление бумаги или картона, требуется четкое поддержание постоянства скорости, а такие механизмы, как подъемные и транспортные, не требуют жестких характеристик (в тяговых электроприводах используется ДПТ ПВ, также он применяется в некоторых крановых механизмах).
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Электромеханическая и механическая характеристика АД.
Схема включения и статические характеристики асинхронного двигателя.
Асинхронные двигатели широко применяются в промышленности благодаря простоте их конструкции, надежности и низкой стоимости.
Трехфазный АД имеет обмотку статора, подключаемую к трехфазной сети переменного тока с напряжением U
и частотой
f
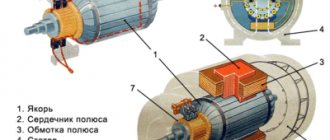
, и обмотку ротора, которая может быть выполнена в двух вариантах. АД с фазным ротором (выполнение обычной трехфазной обмотки из проводников с выводами на три контактных кольца). АД с короткозамкнутым ротором – выполнение обмотки заливкой алюминия в пазы ротора (рис 5.1). Однофазная схема замещения (рис. 5.1)
Рис Схема включения АД с фазным (а), короткозамкнутым ротором (б), Г-образная однофазная схема замещения АД
U1
– действующее значение напряжения, приложенного к одной фазе обмотки статора, частотой
f1
;
Рис Фазное и линейное напряжения
Iμ, I1, I’2 – фазные токи соответственно намагничивания, обмотки статора и ротора (приведенный к числу витков обмотки статора);
R1 – суммарное активное сопротивление фазы статора;
R’2= R’р + R’2д – суммарное активное сопротивление фазы ротора, приведенное к числу витков обмотки статора. Включает в себя R’р, – собственное сопротивление обмотки ротора (приведенное); R’2д – добавочное активное сопротивление (приведенное).
x1, x’2 – индуктивные сопротивления рассеяния соответственно фазы обмотки статора, обмотки ротора (приведенное к числу витков обмотки статора);
Rμ – активное сопротивление, учитывающее потери в стали магнитной системы при перемагничивании;
xμ – индуктивное сопротивления контура намагничивания.
При включении статора в сеть трехфазного тока его обмотки создают магнитное поле Ф
, которое вращается со скоростью
n1
. Силовые линии этого поля пересекают обмотку ротора и индуктируют в ней ЭДС
E2
.
Величина ЭДС пропорциональна разности скоростей поля статора и ротора:
E2~( n1- n)Ф
(#)
По обмотке ротора под действием ЭДС E2
потекут токи, создающие магнитное поле ротора. Магнитное поле ротора взаимодействует с вращающимся полем статора, возникает вращающийся момент. Начав движение, ротор будет «догонять» поле статора. Но у асинхронного двигателя всегда
n< n1
. Иначе при равенстве исчезает ЭДС
E2
, токи, и магнитное поле ротора, и начинается торможение.
Отставание ротора от магнитного поля статора называется скольжением:
= (1)
Отметим, что в схеме замещения зависимость R’2
от скольжения
s
не соответствует физической сущности электромагнитных процессов. В действительности от скольжения зависит индуктивное сопротивление ротора X’2. Так, X’2=ω2L2=2πf2L2 (*). В то же время известно, что частота
f2
ЭДС
Е2
в обмотке ротора зависит от скольжения
f2 = f1 s
. Выполненное же преобразование (деление на s) позволило составить схему замещения.
Электромеханическая и механическая характеристика АД.
В отличие от ДПТ электромеханическая характеристика АД представляется в виде зависимости тока ротора от скольжения I’2= f( s)
, а не от скорости ω. Уравнение электромеханической характеристики следует из схемы замещения:
(2)
В то же время скольжение однозначно определяет величину скорости:
Из (1) (3)
Поэтому при построении характеристик I’2(s) отражается и зависимость I’2
(ω).
Рис Электромеханическая характеристика
На графике ток I1 больше тока I’2 в соответствии со схемой замещения на величину тока холостого хода Iμ (первый закон Кирхгофа).
Рассмотрим характерные точки электромеханической характеристики:
1) Идеальному холостому ходу соответствует скорость вращения ротора ω= ω0
,
скольжение s=0
(ротор и поле статора вращаются синхронно), ток ротора
I’2=0
, статора
I1= Iμ
. Асинхронный двигатель самостоятельно обеспечить этот режим не может. Для создания режима необходимо приводить во вращение с частотой
ω=ω0
другим двигателем. На схеме замещения этому режиму соответствует разрыв цепи ротора (
I’2
).
2) Короткому замыканию (режим пуска) соответствует режим, когда ω=0
, скольжение
s=1
, ток ротора
I’2= I’2п
, статора
I1= I1п
. Ток
I1п
называется пусковым током, достигает 5-7 кратного значения от номинального тока.
, получили приняв s=1;
3) токи статора и ротора I1, I’2
достигают своего максимального значения при минимуме знаменателя выражения (2), когда =>
Этот режим наступает при скоростях выше синхронной ω0
, т.е. в генераторном режиме.
4) При высоких скоростях ω=±∞
, s=
±∞,
значение тока ротора асимптотически приближается к значению
;
Получим выражение для механической характеристики. Потери мощности в цепи ротора (потери скольжения), представляют собой разность электромагнитной и полезной механической мощности:
Потери мощности в роторе, выраженные через электрические величины:
=> , подставив в выражение ток (2) получим
Рис. Механическая характеристика АД
Для определения критического скольжения sк
и момента
Мк
исследуем полученную зависимость M(s) на экстремум обнаружим две точки.
(5) (+ в двигательном, — в генераторном)
Разделив (4) на (5) и выполнив преобразования, получим более удобную форму:
, где — формула Клосса
Для машин средней и большой мощности можно пренебречь активным сопротивлением статора, тогда a=0 и
(6)
Кроме того, в области малых скольжений можно пренебречь s/sк, тогда
(7)
Из (6), обозначив как можно получить выражения для нахождения sк
:
Формула может быть использована для определения sк
по каталожным данным.
Проанализируем особенности механической характеристики АД. Она носит нелинейный характер и состоит из двух частей. Первая – рабочая часть – в пределах скольжения от 0 до sкд. Эта часть характеристики близка к линейной и имеет отрицательную жесткость. Здесь момент, развиваемый двигателем, примерно пропорционален токам статора и ротора. Можно использовать выражение (7).
Вторая часть механической характеристики АД при s>sкд – криволинейная, с положительным значением жесткости. Несмотря на то, что ток двигателя по мере роста скольжения увеличивается (рис 5.3), момент, напротив уменьшается.
Из-за нелинейности механической характеристики существует несоответствие между пусковым током (5-7 кратный) и пусковым моментом (0,4-0,5 номинального). Тяжелый пуск.
Рассмотрим процесс пуска.
Пуск начинается с s=1, в начале пуска скольжение велико. Индуктивное сопротивление обмотки ротора X’2=ω2L2=2πf2L2=2 πsf1L2 велико и существенно превосходит R’2. X2′>>R2′.
ЭДС при этом велика, поскольку ~Ф(n1-n)
Поэтому ток I’2 тоже велик, но его активная составляющая мала (потому что cosφ низкий). Поэтому и момент, развиваемый двигателем мал.
2) При разгоне двигателя скольжение уменьшается, ЭДС ротора снижается, частота тока f2 и X2′ ротора пропорционально уменьшаются.
Соответственно уменьшается полный ток ротора. Активное сопротивление становится соизмеримым с индуктивным, а затем и становится больше. Вследствие повышения cosφ, активная составляющая тока растет, возрастает и момент двигателя.
Т.е. своеобразие механической характеристики АД определяется зависимостью индуктивного сопротивления ротора от скольжения.
Классификация электроприводов
По количеству и связи исполнительных, рабочих органов:
- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M
(или от момента сопротивления
Mc
). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Механические и рабочие характеристики двигателей постоянного тока
Механические характеристики. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной. Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
где R я – активное сопротивление якоря. Преобразуя (5.35) получим уравнение электромеханической характеристики
В соответствии ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
Это уравнение можно представить в виде ω= ω о.ид.— Δ ω, где
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δω= Мэм.[(Rя+Rд)/(kФ) 2 ]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи. Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 5.20,а.
Рис.5.20
Источник