Как известно, частой причиной короткого замыкания и возникновения искры является коллекторный узел двигателя. Из-за непродолжительного срока эксплуатации щеток может возникнуть аварийная ситуация.
Потому специалисты разработали двигатель бесколлекторного принципа работы, который нивелирует возникновения десятков проблем ввиду отсутствия коллекторного узла.
Подробнее о нем, его конструкции принципе действия, мы узнаем из этой статьи.
Терминология бесколлекторного привода
Электрический двигатель постоянного тока бесколлекторного узла имеет название – бесколлекторный. Внутренний прибор, который изменяет ход тока в обмотке называется – драйвер или генератор периодического изменения напряжения, иными словами – инвертор.
Драйвера всегда неподвижно зафиксированы на статоре. В тоже время сетевой коммутатор или сетевой переключатель оснащен полупроводниковыми триодами, которых всего шесть.
Именно они направляют напряжение тока на те или другие витки провода электро-двигателя.
В узкопрофильных публикациях для электромехаников бесколлекторный тип двигателя имеет название вентильный, потому что транзисторы иначе называют именно вентилями.
Кроме того, устройства разделяют не несколько типов в зависимости от конструкции и электродвижущей силы.
В американских источниках один из типов электро-двигателя маркируется буквами BLDC, которые являются аббревиатурой термина, который в дословном значении переводится как «двигатель бесщеточный постоянного тока».
Именно в данном типе происходит ЭДС по схеме трапеции. В другой типе, который маркируется аббревиатурой PMSM, возникает ЭДС по схеме синусоиды.
Преимущества бесщеточных двигателей
Бесщеточные двигатели имеют ряд преимуществ, которые и определили области их применения. Они обладают лучшим быстродействием. Их вращающий момент гораздо выше, в сравнении с обычными двигателями. Бесщеточные конструкции отличаются более высокими динамическими характеристиками и коэффициентом полезного действия.
Среди прочих преимуществ, следует отметить бесшумную работу, увеличенный срок эксплуатации и более высокую частоту вращения. Соотношение размеров двигателя и вращающего момента выше, чем у других типов. Это особенно важно для тех областей, где габариты и вес являются критическими факторами.
Конструкция бесколлекторного электро-двигателя и его принцип работы
Как мы обсудили выше, бесколлекторный электро-двигатель не оснащен коллекторным узлом. Его функцию выполняют сетевой переключатель на полупроводниковых триодах.
Именно радиоэлектронный компонент переключает витки провода неподвижной основы двигателя, при котором одновременно возникает магнитное поле активного вращения, которое начинает вступать в действие с полем валом устройства.
В момент протекания электро-тока через объект проводящий ток в зоне магнитного поля, на него давит сила Ам, благодаря которой и возникает вращающийся момент на роторе электро-двигателя.
На такой не сложной работе основан весь принцип действия бесколлекторного двигателя.
Прежде всего, на неподвижной основе бесколлекторного двигателя чаще всего размещенный три витка проводов, по тому же принципу, что и жилы трех фаз в двигателях переменного электро-тока, потому изредка их именуют 3-х фазными, хотя данный термин подходит только отчасти.
БДПТ (аббревиатура бесколлекторного двигателя) зачастую работают от постоянного питания электро-тока, например, аккумулятор, однако пусковой переключатель постоянно чередует поток напряжения по виткам проводов.
Итоговый результат напряжения тока, который поступает на витки, образуется сигналами управления полупроводниковых триодов по схеме «прямоугольник».
Так называемый, 3-х фазный бесколлекторный привод может быть оснащен либо тремя проводами, либо четырьмя, если тип обвития проводов по схеме «звезда».
Витки медных жил располагаются, в так называемых «зазубринах», основы неподвижного элемента устройства.
Ввиду того, что конструкции бесколлекторного двигателя могут отличаться, точно также как и их предназначение, количество витков проводов, катушек или обмоток, что подразумевает одно и тоже, может отличаться. Также существует несколько схем витков.
В зависимости от выбранной схемы, жили витков в каждой зазубрине, могут быть соединены поочередно или напротив друг друга. Также существует аналогичный вариант, как у ДПТ по схеме «звезда» или «треугольник».
Как мы писали выше, все зависит от поставленной цели перед определенным устройством.
Рекомендуем просмотреть рисунки ниже.
Кроме того, неподвижная основа, или статор, может быть оснащена автоматическими датчиками реагирования положения вала. Нередко используют известные и распространенные магнитные микрокомпоненты Холла, которые используются в бытовой технике, например, стиральных машинах.
Именно они могу давать соответствующий сигнальный импульс на контролирующий переключатель, под воздействием магнитного поля вала.
Такой процесс крайне важен, поскольку переключателю необходимо вовремя изменить подачу питания на нужные витки проводов катушки. Благодаря этому, электро-двигатель будет работать максимально эффективно без пустой траты ресурсов.
Чаще всего на один бесколлекторный привод устанавливают три датчика, которых вполне хватает. Однако их наличие немного усложняет конструкцию, но для многих специалистов подвести пару дополнительных кабелей для питания, не составит особого труда.
Кроме того, для активизации работы электро-двигателя всегда монтируются магниты на вале, а для остановки – на неподвижном элементе.
Как вы наверняка знаете, в двигателях с коллекторными узлами принцип в точности наоборот, важно не перепутать этот момент и уделить ему достаточно внимания.
Сами магнитные элементы монтируются по чередованию положительного заряда, однако это не значит, что количество элементов прямо пропорционально количеству положительных зарядов.
Несколько элементов могут образовывать один положительный заряд. Как в случае и с другими электро-двигателями, количество положительных зарядом равно количеству вращений вала в минуту.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Типы бесколлекторных электро-двигателей
Как мы описывали выше, БДТП могут разделяться на разные типы в зависимости от противоэлектродвижущей силе, схеме устройства и оснащенности датчиками Холла. Основные два вида, мы уже обсудили выше, этоBLDC – схема трапеция иPMSM – схема синус.
Для правильного использования необходимо подключать их к различным источника электричества, однако в своей практике специалисты используют их как аналогичные устройства с единым аккумулятором.
В зависимости от схемы конструирования устройства, бесколлекторные двигатели разделяются на следующие типы:
- Оснащенные вращающимся валом внутри. Самый распространенный вариант, который часто применяется электрических устройствах с высоким количеством оборотов в минуту.
- Оснащенный внешним вращающимся валом. Данный тип часто применяют в устройствах, в которых нужно словить вращающийся момент.
Чтобы выбрать тот или иной тип двигателя необходимо наверняка знать, где он будет использоваться.
На данный момент производители изготавливают многочисленные варианты бесколлекторных двигателей и с датчиками Холла, и без них в том числе.
Специалисты утверждают, что хотя микрокомпоненты очень полезны для работы и повышают ее качества, а также могут выполнять несколько задач, например: питание витков жил, контроль положения по электродвижущей силе, все же иногда можно обойтись и без них.
Главные параметры БДТП:
- Длительность работы, от максимума до минимума.
- Верхняя граница рабочего тока.
- Верхняя граница рабочего электро-напряжения.
- Верхняя граница мощности устройства.
- Верхняя граница вращений. На заметку. Производитель может указать количество вращений на один вольт напряжения без нагрузки на ротор. Чтобы определить данный параметр необходимо указанный показатель умножить на показатель верхней границы рабочего электро-напряжения.
- Обратная сила витков жил. Коэффициент ПД будет выше, если данный показатель максимально низкий.
- Секунды, через которые ток в витках жил достигнем своего максимального значения верхней границы.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла. Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя. Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Подключение бесколлекторного двигателя и схематическая демонстрация
Как мы писали выше, для правильной работы БДПТ необходим специализированный прибор для переключения напряжения. Чтобы выбрать подходящий необходимо учесть силу тока. Приобрести приборы переключения можно в комплекте или по отдельности. Устройство иностранных производителей может иметь название «Электрический Контроллер».
Сам процесс подключения очень простой и не составит проблемы даже для начинающего специалиста. Основное, что не сточит забывать, что для изменения направленности оборотов нужно переключить сразу две жилы фаз, точно также как и в остальных двигателях.
Также обязательно уделите несколько минут своего времени, чтобы просмотреть информативные видео-уроки, размещенные в конце данной статьи.
Двигатель постоянного тока без щеток. Как это работает?
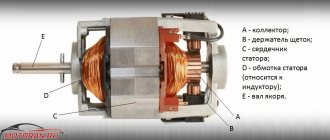
Для того, чтобы работа приборов была более надежной, более эффективной и менее шумной, в последнее время наметилась тенденция использовать бесщеточные двигатели постоянного тока. Они также легче по сравнению с щеточными двигателями при одной и той же выходной мощности. В обычных двигателях постоянного тока щетки с течением времени изнашиваются, и могут вызывать искрение. Таким образом, двигатель с щетками не должен использоваться там, где требуется надежность и длительный срок службы. Давайте посмотрим, как работает бесщеточный двигатель постоянного тока. Ротор такого электродвигателя оснащен постоянными магнитами. Статор имеет расположение катушек, как показано на рисунке. Подавая постоянный ток в катушку, катушка станет электромагнитом. Работа двигателя основана на взаимодействии магнитных полей между постоянным магнитом и электромагнитом. В этом состоянии, когда катушка A находится под напряжением, противоположные полюса ротора и статора притягиваются друг к другу. Как только к ротору приближается катушки A, на катушку B подается напряжение. К ротору приближается катушка B, на катушку C подается напряжение. После этого на катушку A подается напряжение обратной полярности. Этот процесс повторяется, и ротор продолжает вращаться. Юмористическая аналогия, чтобы понять работу двигателя вспомним историю о осле и моркови. Осел старается догнать морковь, но еда двигается одновременно с ним и остается вне досягаемости. Даже при том, что этот мотор работает, он имеет один недостаток. Как вы можете заметить, что в любой момент времени только одна катушка находится под напряжением. Две не работающих катушки значительно уменьшают выходную мощность двигателя. Но есть трюк, способный преодолеть эту проблему. Когда ротор находится в этом положении вместе с первой катушкой, которая тянет ротор, можно возбудить катушку позади него таким образом, что она тоже будет толкать ротор. В этот момент ток той же самой полярности пропускают через вторую катушку. Комбинированный эффект дает больше вращающего момента и мощности от двигателя. Объединение сил также гарантирует, что у двигателя будет ровная и постоянная характеристика крутящего момента. При этой конфигурации, две катушки должны включаться отдельно, но, сделав небольшую модификации с обмоткой статора можно упростить этот процесс. Просто подключите свободные концы катушки вместе. При подаче питания на катушки А и В, через них пойдет ток. То же самое, как если бы мы подавали напряжение отдельно. Вот так он работает, но у вас, возможно появились сомнения: «Как мне узнать, на какую катушку статора подавать напряжение?» «Как подавать напряжение, чтобы получить непрерывное вращение от ротора?» Для этого мы используем электронный контроллер. Датчик A определяет положение ротора и на основании этой информации контроллер решает, на какие катушки подавать напряжение. Чаще всего для этой цели используется эффект датчика Холла. До сих пор мы обсуждали конструкцию известную, как «внешний разгон». Конструкция «внутреннего разгона» также доступна на рынке. Мы надеемся, что вы почерпнули полезную информацию. Спасибо. _
Источник
Область применения БДПТ
БДТП широко используют как и для мелкой бытовой техники, аудио-, видео- устройствах, а также компонентах ПК и ноутбуков, таких как: жесткие диски, проигрыватели, дисководы, аккумуляторы и батареи.
Также их применяют для гаджетов и девайсов для развлечений и работы, как радиоуправляемые приборы. Без БДТП не обходится и на производственных станках и профессиональном заводском оборудовании.
Бесколлекторные двигатели обязательно оснащают колеса современной электро-техники, например, скутера, мотоциклы, велосипеды и сигвеи. Не исключение и экологически чистые новинки автомобилей.
Как видно область БДТП невероятно огромна, поскольку отсутствие самого коллектора позволяет использовать устройство в местах с повышенным риском аварийных ситуаций, слишком высокой влажностью, резкими перепадами температур.
Дошло до того, что БДТП используют в космическом производстве, что не может не радовать наблюдателей технического прогресса.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение.
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели водоотталкивающей смазкой.
- Наименьшие радиопомехи.
Минусы:
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.
Решение задач по ТОЭ, ОТЦ, Высшей математике, Физике, Программированию…
БЕСКОНТАКТНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
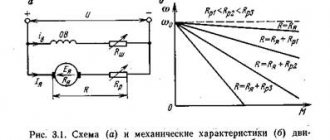
Двигатели постоянного тока обычного исполнения имеют ценное качество-возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно-коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.
Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
П р и н ц и п д е й с т в и я
бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме «закрыт» или «открыт».
Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном на рис.5.2, сигнальный элемент через чувствительный элемент «А» открывает транзистор ТА. По обмотке А протекает ток IА. Намагничивающая сила обмотки FА взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1-й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший 30° СЭ будет воздействовать сразу на два ЧЭ: на «А» и на «В». Это значит, что будут открыты сразу два транзистора: ТА и ТВ. Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора FАВ, которая повернется на 60° по сравнению с первым положением (2-й такт на рис. 5.3).
Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3-4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента — возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
где Т = L/r — электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
(5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при L = 0
Вращающий момент прямо пропорционален току якоря, поэтому
| (5.5) |
или
(5.6)
Анализ выражения (5.6) показывает, что момент имеет две составляющие. Первую — не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую — переменную. Она появляется из-за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение (U > E). Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Подставим значение ЭДС Е = сеnФ в формулу (5.6), получим механическую характеристику бесконтактного двигателя
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент (n = 0, U = Uном), а за базисную скорость — скорость холостого хода (М = 0, U = Uном ). Время t = ¥
Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения α и L: L2 > L1 > 0
Разделим обе части уравнения (5.7) на Мп:
(5.8)
Обозначим a = U/Uном. С учетом n0 = U/(сеФ) получим
(5.9)
где n = n/n0 — относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
§ 5.1. Датчики положения ротора
Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.
Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными элементами датчика являются три трансформатора (Тр1, Тр2, Тр3), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы: 1) Нарисуйте диаграмму НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что дуга чувствительного элемента не 180° , а 120° .
2) Чему равна величина суммарного тока, потребляемого двигателем из сети, при различных углах поворота ротора и дуге ЧЭ в 120° ?
Понятие ШИМ частоты
Когда происходит включение ключей, полная нагрузка подаётся на двигатель. Агрегат достигает максимальных оборотов. Для того чтобы управлять двигателем, нужно обеспечить регулятор питания. Именно это осуществляет широтно-импульсная модуляция (ШИМ).
Устанавливается необходимая частота открытия и закрытия ключей. Напряжение меняется с нулевого на рабочее. Чтобы управлять оборотами, необходимо наложить сигнал ШИМ на сигналы ключей.
Схема регулятора оборотов двигателя постоянного тока на напряжение 12 вольт
Сигнал ШИМ может быть сформирован аппаратом на несколько выводов. Или создать ШИМ для отдельного ключа программой. Схема становится проще. ШИМ сигнал имеет 4— 80 килогерц.
Увеличение частоты приводит к большему количеству процессов перехода, что даёт выделение тепла. Высота частоты ШИМ повышает количество переходных процессов, от этого происходят потери на ключах. Маленькая частота не даёт нужную плавность управления.
Чтобы уменьшить потери на ключах при переходных процессах, ШИМ сигналы подаются на верхние или на нижние ключи по отдельности. Прямые потери рассчитываются по формуле P=R*I2, где P — мощность потерь, R — сопротивление ключа, I — сила тока.
Меньшее сопротивление минимизируют потери, увеличивает КПД.