Мощность постоянного тока
Определения и формулы
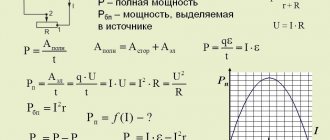
Мощность – это работа, произведенная за единицу времени. Электрическая мощность равна произведению тока на напряжение: P=U∙I. Отсюда можно вывести другие формулы для мощности:
Единицу измерения мощности получим, подставив в формулу единицы измерения напряжения и тока:
Единица измерения электрической мощности, равная 1 ВА, называется ватом (Вт). Название вольт-ампер (ВА) используется в технике переменного тока, но только для измерения полной и реактивной мощности.
Единицы измерения электрической и механической мощности связаны следующими соотношениями:
1 Вт =1/9,81 кГ•м/сек ≈1/10 кГ•м/сек;
1 кГ•м/сек =9,81 Вт ≈10 Вт;
1 л.с. =75 кГ•м/сек =736 Вт;
1 кВт =102 кГ•м/сек =1,36 л.с.
Если не учитывать неизбежных потерь энергии, то двигатель мощностью 1 кВт может перекачивать каждую секунду 102 л воды на высоту 1 м или 10,2 л воды на высоту 10 м.
1. Нагревательный элемент электрической печи на мощность 500 Вт и напряжение 220 В выполнен из проволоки высокого сопротивления. Рассчитать сопротивление элемента и ток, который через него проходит (рис. 1).
Ток найдем по формуле электрической мощности P=U∙I,
откуда I=P/U=(500 Bm)/(220 B)=2,27 A.
Сопротивление рассчитывается по другой формуле мощности: P=U^2/r,
откуда r=U^2/P=(220^2)/500=48400/500=96,8 Ом.
2. Какое сопротивление должна иметь спираль (рис. 2) плитки при токе 3 А и мощности 500 Вт?
Для этого случая применим другую формулу мощности: P=U∙I=r∙I∙I=r∙I^2;
отсюда r=P/I^2 =500/3^2 =500/9=55,5 Ом.
3. Какая мощность превращается в тепло при сопротивлении r=100 Ом, которое подключено к сети напряжением U=220 В (рис. 3)?
4. В схеме на рис. 4 амперметр показывает ток I=2 А. Подсчитать сопротивление потребителя и электрическую мощность, расходуемую в сопротивлении r=100 Ом при включении его в сеть напряжением U=220 В.
P=U∙I=220∙2=440 Вт, или P=U^2/r=220^2/110=48400/110=440 Вт.
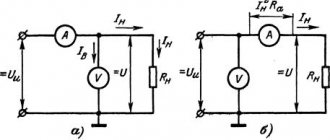
5. На лампе указано лишь ее номинальное напряжение 24 В. Для определения остальных данных лампы соберем схему, показанную на рис. 5. Отрегулируем реостатом ток так, чтобы вольтметр, подключенный к зажимам лампы, показывал напряжение Uл=24 В. Амперметр при этом показывает ток I=1,46 А. Какие мощность и сопротивление имеет лампа и какие потери напряжения и мощности возникают на реостате?
Мощность лампы P=Uл∙I=24∙1,46=35 Вт.
Ее сопротивление rл=Uл/I=24/1,46=16,4 Ом.
Падение напряжения на реостате Uр=U-Uл=30-24=6 В.
Потери мощности в реостате Pр=Uр∙I=6∙1,46=8,76 Вт.
6. На щитке электрической печи указаны ее номинальные данные (P=10 кВт; U=220 В).
Определить, какое сопротивление представляет собой печь и какой ток проходит через нее при работе P=U∙I=U^2/r;
r=U^2/P=220^2/10000=48400/10000=4,84 Ом; I=P/U=10000/220=45,45 А.
7. Каково напряжение U на зажимах генератора, если при токе 110 А его мощность равна 12 кВт (рис. 7)?
Так как P=U∙I, то U=P/I=12000/110=109 В.
8. На схеме на рис. 8 показана работа электромагнитной токовой защиты. При определенном токе электромагнит ЭМ, который удерживается пружиной П, притянет якорь, разомкнет контакт К и разорвет цепь тока. В нашем примере токовая защита разрывает токовую цепь при токе I≥2 А. Сколько ламп по 25 Вт может быть одновременно включено при напряжении сети U=220 В, чтобы ограничитель не сработал?
Защита срабатывает при I=2 А, т. е. при мощности P=U∙I=220∙2=440 Вт.
Разделив общую мощность одной лампы, получим: 440/25=17,6.
Одновременно могут гореть 17 ламп.
9. Электрическая печь имеет три нагревательных элемента на мощность 500 Вт и напряжение 220 В, соединенных параллельно.
Каковы общее сопротивление, ток и мощность при работе печи (рис.91)?
Общая мощность печи P=3∙500 Вт =1,5 кВт.
Результирующий ток I=P/U=1500/220=6,82 А.
Результирующее сопротивление r=U/I=220/6,82=32,2 Ом.
Ток одного элемента I1=500/220=2,27 А.
Сопротивление одного элемента: r1=220/2,27=96,9 Ом.
10. Подсчитать сопротивление и ток потребителя, если ваттметр показывает мощность 75 Вт при напряжении сети U=220 В (рис.10).
Так как P=U^2/r, то r=U^2/P=48400/75=645,3 Ом.
Ток I=P/U=75/220=0,34 А.
11. Плотина имеет перепад уровней воды h=4 м. Каждую секунду через трубопровод на турбину попадает 51 л воды. Какая механическая мощность превращается в генераторе в электрическую, если не учитывать потерь (рис. 11)?
Механическая мощность Pм=Q∙h=51 кГ/сек ∙4 м =204 кГ•м/сек.
Отсюда электрическая мощность Pэ=Pм:102=204:102=2 кВт.
12. Какую мощность должен иметь двигатель насоса, перекачивающего каждую секунду 25,5 л воды с глубины 5 м в резервуар, расположенный на высоте З м? Потери не учитываются (рис. 12).
Общая высота подъема воды h=5+3=8 м.
Механическая мощность двигателя Pм=Q∙h=25,5∙8=204 кГ•м/сек.
Электрическая мощность Pэ=Pм:102=204:102=2 кВт.
13. Гидроэлектростанция получает из водохранилища на одну турбину каждую секунду 4 м3 воды. Разница между уровнями воды в водохранилище и турбине h=20 м. Определить мощность одной турбины без учета потерь (рис. 13).
Механическая мощность протекающей воды Pм=Q∙h=4∙20=80 т/сек•м; Pм=80000 кГ•м/сек.
Электрическая мощность одной турбины Pэ=Pм:102=80000:102=784 кВт.
14. У двигателя постоянного тока с параллельным возбуждением обмотка якоря и обмотка возбуждения соединены параллельно. Обмотка якоря имеет сопротивление r=0,1 Ом, а ток якоря I=20 А. Обмотка возбуждения имеет сопротивление rв=25 Ом, а ток возбуждения равен Iв=1,2 А. Какая мощность теряется в обеих обмотках двигателя (рис. 14)?
Потери мощности в обмотке якоря P=r∙I^2=0,1∙20^2=40 Вт.
Потери мощности в обмотке возбуждения
Общие потери в обмотках двигателя P+Pв=40+36=76 Вт.
15. Электроплитка на напряжение 220 В имеет четыре переключаемые ступени нагрева, что достигается путем различных включений двух нагревательных элементов с сопротивлениями r1 и r2, как это показано на рис. 15.
Определить сопротивления r1 и r2, если первый нагревательный элемент имеет мощность 500 Вт, а второй 300 Вт.
Так как мощность, выделяемая в сопротивлении, выражается формулой P=U∙I=U^2/r, то сопротивление первого нагревательного элемента
а второго нагревательного элемента r2=U^2/P2 =220^2/300=48400/300=161,3 Ом.
В положении ступени IV сопротивления соединяются последовательно. Мощность электроплитки в этом положении равна:
P3=U^2/(r1+r2 )=220^2/(96,8+161,3)=48400/258,1=187,5 Вт.
В положении ступени I нагревательные элементы соединены параллельно и результирующее сопротивление равно: r=(r1∙r2)/(r1+r2)=(96,8∙161,3)/(96,8+161,3)=60,4 Ом.
Мощность плитки в положении ступени I: P1=U^2/r=48400/60,4=800 Вт.
Эту же мощность получим, сложив мощности отдельных нагревательных элементов.
16. Лампа с вольфрамовой нитью рассчитана на мощность 40 Вт и напряжение 220 В. Какие сопротивление и ток имеет лампа в холодном состоянии и при рабочей температуре 2500 °С?
Мощность лампы P=U∙I=U^2/r.
Отсюда сопротивление нити лампы в горячем состоянии rt=U^2/P=220^2/40=1210 Ом.
Сопротивление холодной нити (при 20 °С) определим по формуле rt=r∙(1+α∙∆t),
откуда r=rt/(1+α∙∆t)=1210/(1+0,004∙(2500-20) )=1210/10,92=118 Ом.
Через нить лампы в горячем состоянии проходит ток I=P/U=40/220=0,18 А.
Ток при включении равен: I=U/r=220/118=1,86 А.
При включении ток примерно в 10 раз больше, чем ток горячей лампы.
17. Каковы потери напряжения и мощности в медном контактном проводе электрифицированной железной дороги (рис. 16)?
Механические характеристики двигателей постоянного тока
Аналитическое выражение механической характеристики двигателя постоянного тока можно получить из уравнения равновесия напряжений якорной цепи (при установившемся режиме)
где U
— напряжение на зажимах двигателя, В;
1Я
— ток в цепи якоря, A;
Rя
— сопротивление цепи якоря, Ом; Ф — магнитный поток двигателя, Вб; ω — угловая скорость якоря, рад/с; сд — коэффициент, зависящий от конструктивных данных двигателя. Решив уравнение (3.1) относительно угловой скорости, получим уравнение скоростной характеристики двигателя
Электромагнитный вращающий момент двигателя (Н • м) пропорционален магнитному потоку и току якоря:
Из уравнения (3.3) ток якоря
Подставив в уравнение (3.2) значение тока, выраженное уравнением (3.4), получим уравнение механической характеристики двигателей постоянного тока независимо от способа возбуждения
Рассмотрим механические характеристики двигателей постоянного тока в зависимости от способа возбуждения.
Двигатели постоянного тока параллельного возбуждения. Схема включения двигателя постоянного тока параллельного возбуждения приведена на рис. 3.1, а. Обмотка возбуждения ОВ
может быть подключена к той же сети, что и якорь, или к отдельному источнику тока (независимое возбуждение). В том и другом случае ток возбуждения не зависит от процессов, происходящих в якоре двигателя и при постоянном напряжении сети магнитный поток можно считать постоянным Ф = const. Обозначив сдФ=kд и подставив его в уравнение (3.5), получим уравнение механической характеристики двигателя постоянного тока параллельного возбуждения
При М=0
угловая скорость якоря
называется скоростью идеального холостого хода.
Второй член уравнения (3.6) определяет изменение угловой скорости двигателя при изменении момента
Величина Δω зависит не только от момента, но и от сопротивления цепи якоря. С увеличением Rя величина Δω увеличивается. С учетом уравнений (3.7) и (3.8) уравнение (3.6) можно записать в виде
Из уравнений (3.6) и (3-.9) видно, что механическая характеристика двигателя параллельного возбуждения является прямой линией, тангенс угла наклона которой определяется величиной R
я/kд2
На рис. 3.1,6 приведены естественная и искусственные механические характеристики, полученные введением в цепь якоря реостата. Такие искусственные характеристики используются при пуске и торможении двигателя.
Двигатели постоянного тока последовательного возбуждения. Схема включения двигателя последовательного возбуждения приведена на рис. 3.2, а.
Обмотка возбуждения
ОВ
включена последовательно с якорем и по ней протекает ток якоря. Следовательно, магнитный поток двигателя является функцией тока якоря. Эта зависимость выражается графически в виде кривой намагничивания, которая является нелинейной функцией и не имеет аналитического выражения. Поэтому нельзя получить аналитическую зависимость для механической характеристики.
Характерной особенностью двигателей последовательного возбуждения является то, что изменение магнитного потока с изменением тока якоря оказывает большое влияние на скорость двигателя. Это хорошо видно из уравнения скоростной характеристики
которое показывает, что с изменением магнитного потока скорость двигателя может изменяться в широких пределах.
Если для упрощения предположить, что магнитная цепь двигателя не насыщена и поток пропорционален току
Ф = сф/Я,
то момент двигателя
где k = cд / сф.
Подставив в уравнение скоростной характеристики значение Ф = Сф/я, получим
где R
— внутреннее сопротивление цепи якоря, равное сумме сопротивлений обмоток якоря и возбуждения
(Rя + rя).
Заменив в уравнении ток якоря его выражением из (3.10), получим уравнение механической характеристики
Уравнение (3.12) представляет собой уравнение кривой, для которой ось ординат является асимптотой. Подобная характеристика представлена на рис. 3.2,6. Уравнение (3.12) дает лишь общее представление о механической характеристике двигателя. При расчетах им пользоваться нельзя, так как аналитически учесть намагничивание стали невозможно. Как видно на рис. 3.2,6, механическая характеристика двигателя последовательного возбуждения — мягкая. При уменьшении нагрузки угловая скорость резко возрастает, а при М = 0
она стремится к бесконечности. В реальных двигателях ток при холостом ходе не может быть равен нулю вследствие потерь в стали и механических потерь, но угловая скорость может достигнуть опасных по условиям механической прочности значений, равных (5÷6)ωном. Поэтому холостой ход для двигателей последовательного возбуждения недопустим.
Двигатели постоянного тока смешанного возбуждения. Двигатели смешанного возбуждения имеют две обмотки возбуждения (рис. 3.3). Магнитный поток двигателя определяется суммой потоков параллельной ОВпар
и последовательной
ОВпос
обмоток:
Вследствие нелинейной зависимости магнитного потока от тока якоря аналитическое выражение механической характеристики, так же как и для двигателя последовательного возбуждения, получить нельзя.
В зависимости от соотношения магнитных потоков обмоток возбуждения механические характеристики имеют различную жесткость. Чем больше доля магнитного потока последовательной обмотки, тем мягче характеристика. На рис. 3.3 приведены две естественные характеристики с различным соотношением магнитных потоков обмоток возбуждения. Обмотка параллельного возбуждения создает поток Фпар независимый от тока якоря, поэтому двигатель может работать вхолостую со скоростью
Предыдущая2Следующая
ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между…
ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала…
ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры…
ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования…
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
Расчетные формулы параметров машин постоянного тока
В таблице 1 представлены расчетные формулы для определения основных параметров машин постоянного тока.
В данной таблице собраны все формулы, которые касаются расчета параметров машин постоянного тока.
Таблица 1 — Расчетные формулы для определения основных параметров машин постоянного тока
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» .
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Выбор устройства от импульсных перенапряжений (УЗИП) необходимо осуществлять в соответствии с.
Представляю вашему вниманию таблицу с расчетными формулами, которые используются при расчете потерь.
В данном примере требуется выбрать опорные изоляторы для раннее выбранных сборных шин 10 кВ. Исходные.
В данном примере требуется определить максимальные потери напряжения в нормальном и аварийном режимах в.
Выбор напряжения конденсатора для конденсаторного двигателя является не менее важным, чем определение.
Отправляя сообщение, Вы разрешаете сбор и обработку персональных данных. Политика конфиденциальности.
Источник
Электромагнитный момент машины постоянного тока.
Момент возникает всегда, если в обмотке протекает ток, а она сама находится в магнитном поле. Однако роль электромагнитного момента в генераторе и двигателе различна. В двигателе момент является вращательным, а в генераторе тормозным, т. е противодействующим вращению якоря. Поэтому часто говорят, что генератор работает в режиме тормозящего момента, а двигатель в режиме противо – ЭДС.
Реакция якоря машины постоянного тока.
Воздействие намагничивающей силы якоря на основное поле называется реакцией якоря.
В машине результирующее поле одно, оно определяется совместным действием главного поля (создаваемого катушками возбуждения) и поля от реакции якоря.
Реакция якоря проявляется при работе машины под нагрузкой. Проявление реакции зависит от режима работы (двигатель или генератор):
1) От положения щёток относительно геометрической нейтрали
2) От насыщения магнитной цепи
Реакция якоря искажает основное поле машины. Реакция якоря может уменьшить основное поле машины, если магнитопровод насыщен.
Радикальным средством уменьшения реакции якоря является установка компенсационной обмотки, которая размещается в пазах башмаков главных полюсов и включается последовательно с обмоткой якоря. Но так, чтобы её намагничивающая сила была направлена противоположно намагничивающей силе якоря. Тогда результирующая кривая будет похожа на кривую при холостом ходе.
Компенсационная обмотка является радикальным средством, уничтожающим искажающее действие реакции якоря.
Другим, менее радикальным средством ослабления реакции якоря является увеличение зазора под краями главных полюсов.
Коммутация машин постоянного тока.
Коммутация – совокупность процессов, связанных с изменением тока в секции якоря при переходе её из одной параллельной ветви в другую. Процесс этот происходит под щёткой. Сопровождается этот процесс искрением. Искрение классифицируется ГОСТом.
Расчёт коммутации – переключение.
Для искрения ГОСТ 183-74.
Причины искрения:
- Механические
- Электромагнитного характера
- Потенциального характера
еср – среднее межламельное напряжение.
< 21 В
При неблагоприятных обстоятельствах искрение может перерасти в круговой огонь на коллекторе и вызвать тяжёлую аварию. Круговой огонь представляет собой электрическую дугу, охватывающую коллектор частично или полностью.
Длительность коммутационного процесса оценивается периодом коммутации:
Пример: β – сколько коллекторных пластин перекрывает щётка.
; ; 2.5 – 4.5;
n = 720 об/мин = 12 об/сек; k=300;
c
Расчет основных параметров двигателя с шильдика
Электродвигатели встречаются в промышленности и быту повсеместно. Если Вы не обращали внимание, то я приведу парочку фото примеров:
Порой возникает необходимость, рожденная будничным любопытством, либо производственной необходимостью в определении мощности электродвигателя по внешнему виду, или значения допустимой температуры в эксплуатации, не говоря уже о значениях тока и напряжения.
Тут возможен вариант, что с него содрана табличка, на которой написаны номинальные параметры, либо же шильдик в таком состоянии, что различить ничего невозможно. Как же быть в такой ситуации…
Одно дело, если Вы всю жизнь работали на производстве движков, и можете определить мощность на глаз. В иных случаях, определить поможет линейка (рулетка) и таблицы с габаритами механизмов.
Если Ваша деятельность больше лежит в теоретических изысканиях, нежели практических, то пригодится формула определения мощности ЭД или таблицы с номинальным данными, именно про это и не только в этой статье.
Бирка (шильдик) электродвигателя
Осмотрев любой, за редким исключением, электродвигатель можно обнаружить табличку, привинченную на болты, саморезы или же заклепки. Что же написано на данном куске металла? Возьмем шильдик, заменив на нем заводской номер на название сайта.
Кстати, редко бывает, что табличка на электрооборудование находится в таком, почти идеальном состоянии. Часто данные выцветают или замазаны краской, ведь задача стоит для обслуживающего персонала покрасить двигатель, а не покрасить двигатель, оставив табличку нетронутой. Но, нам повезло. Пойдем по-порядку.
Первая строчка
— число фаз и тип тока (3
), заводской номер, частота сети, форма исполнения и монтажа, класс изоляции
Вторая строчка
— тип электродвигателя, косинус фи, возможные схемы соединения, номинальная частота вращения
Третья строчка
— возможные номинальные напряжения, номинальная мощность, IP — степень защиты электродвигателя, масса, режим работы электродвигателя (S1).
Четвертая строчка
— номинальные токи в зависимости от схемы включения обмоток, далее какому госту соответствует эд.
Рассмотрим отдельные параметры более подробно.
Мощность электродвигателя: полная, активная и на валу
Формула для расчета мощности трехфазного асинхронного двигателя:
S1 — полная мощность, потребляемая двигателем из сети
P1 — активная мощность, потребляемая электродвигателем из сети (указана на шильдике)
P — активная мощность на валу ЭД.
cosf — косинус фи, коэффициент мощности — угол сдвига фаз между активной (P) и полной мощностью (S).
В формулах выше, значение мощности получится в Вт, значение полной мощности в ВА. Чтобы перевести в киловатты необходимо получившееся значение разделить на тысячу. Значение тока и напряжения соответственно в формуле выше в амперах и вольтах.
I1 и U1 — линейные значения тока и напряжения, их еще называют междуфазными. Не стоит путать с фазными. Линейные — это АВ, ВС, СА (380); фазные — АО, ВО, СО (220). Если выразить формулы мощностей через фазные значения тока и напряжения, то вместо корня из трех вначале будет коэффициент 3. Этот коэффициент определяется наглядно через векторную диаграмму трехфазного напряжения.
Для двигателей постоянного тока формула будет просто произведение напряжения на зажимах двигателя умножить на ток, потребляемые двигателем из сети.
Потребляемая мощность p1 больше мощности на валу ЭД из-за потерь, которые возникают при преобразовании электрической энергии в механическую.
Звезда/Треугольник и 220/380, 380/660
Смотреть все значения по порядку как они идут через дробь. То есть написано на шильде Y/D ( треугольник/звезда), значит и токи, напряжения соответственно будут сначала для Y, а после дроби для звезды. Единственно, нюанс, что при 220/380 — треугольник будет 220, А при 380/660 — треугольник будет 380. То есть говорить, что 380 — это всегда звезда — неверно.
Всегда изучайте табличку на движке перед подключением.
Достоинства при подключении звездой и треугольником абстрактны, так как каждая схема имеет свои области применения:
- Y — меньше рабочий и пусковой ток, больше напряжение, меньше пусковой момент, меньше греется
- D — больше пусковой момент, пусковой ток, но и больше греется.
Бывают двухскоростные двигатели, где сначала запускаются на звезде, А потом переходят на треугольник. В таком случае механизм легче запускается, А потом работает с большей мощностью.
При подключении трехфазного двигателя на 220В, где есть лишь фаза и ноль, можно прибегнуть к схеме с конденсаторами.
Форма исполнения и способ монтажа
IM 1081 — форма исполнения и способ монтажа согласно ГОСТ 2479 и МЭК60034-5. В нашем примере это обозначает “на лапах с двумя подшипниковыми щитами, с одним циллиндрическим концом вала”.
Расчет мощности электродвигателя
Преобразование электрической энергии в кинетическую осуществляется при помощи различных типов электродвигателей. Чаще всего электродвигатели выполняют функцию электроприводов машин и механизмов, применяются для обеспечения работы насосного оборудования, вентиляционных систем и многих других агрегатов и устройств. В связи с таким широким применением, особую актуальность приобретает расчет мощности электродвигателя. Для этих целей разработано много различных методов, позволяющих выполнить расчеты, применительно к конкретным условиям эксплуатации.
- Основные типы электродвигателей
- Расчет мощности электродвигателя для насоса
- Расчет мощности двигателя формула для компрессора
- Формула расчета для вентиляторов
- Расчет пускового тока электродвигателя
- Режимы работы электродвигателей
Основные параметры электродвигателя постоянного тока
Постоянная момента
,
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
,
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
Основные типы электродвигателей
Существует множество типов и модификаций электродвигателей. Каждый из них обладает собственной мощностью и другими параметрами.
Основная классификация разделяет эти устройства на электродвигатели постоянного и переменного тока. Первый вариант применяется значительно реже, поскольку для его эксплуатации требуется обязательное наличие источника постоянного тока или устройства, преобразующего переменное напряжение в постоянный ток. Выполнение данного условия в современном производстве потребует значительных дополнительных затрат.
Но, несмотря на существенные недостатки, двигатели постоянного тока имеют высокий пусковой момент и стабильно работают даже при больших перегрузках. Благодаря своим качествам, эти агрегаты нашли широкое применение на электротранспорте, в металлургической и станкостроительной отрасли.
Тем не менее, большинство современного оборудования работает с двигателями переменного тока. В основе действия этих устройств лежит электромагнитная индукция, которую создает в магнитном поле проводящая среда. Магнитное поле создается с помощью обмоток, обтекаемых токами, или с применением постоянных магнитов. Электродвигатели, работающие на переменном токе, могут быть синхронными и асинхронными.
Использование синхронных электродвигателей практикуется в оборудовании, где требуется постоянная скорость вращения. Это генераторы постоянного тока, насосы, компрессоры и другие аналогичные установки. Различные модели отличаются собственными техническими характеристиками. Например, значение скорости вращения может находиться в пределах 125-1000 оборотов в минуту, а мощность достигает 10 тыс. киловатт.
Во многих конструкциях имеется короткозамкнутая обмотка, расположенная на роторе. С ее помощью, в случае необходимости, производится асинхронный пуск, после чего синхронный двигатель продолжает работу в обычном режиме, максимально сокращая потери электрической энергии. Эти двигатели отличаются небольшими размерами и высоким коэффициентом полезного действия.
Гораздо более широкое распространение в производственной сфере получили асинхронные двигатели переменного тока. Они отличаются очень высокой частотой вращения магнитного поля, значительно превышающей скорость вращения ротора. Существенным недостатком этих устройств считается снижение КПД до 30-50% от нормы при низких нагрузках. Кроме того, во время пуска параметры тока становятся в несколько раз больше по сравнению с рабочими показателями. Данные проблемы устраняются путем использования частотных преобразователей и устройств плавного пуска.
Асинхронные двигатели используются на тех объектах, где требуются частые включения и выключения оборудования, например, в лифтах, лебедках, и других устройствах.
7.4. ЭДС И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
Как уже отмечалось, ЭДС, наведенная в обмотке вращающегося якоря генератора, пропорциональна магнитному потоку полюсов и частоте его вращения:
Магнитный поток в генераторе, как известно, создается током возбуждения Iв. Если вращать якорь c постоянной частотой n и непрерывно измерять выходную ЭДС Е, то можно построить график Е = f (Iв) (рис. 7.4.1).
Эта зависимость называется характеристикой холостого хода.
Она строится для режима, когда генератор не имеет внешней нагрузки, т.е. работает вхолостую. Если подключить к генератору нагрузку, то напряжение на его зажимах будет меньше E на величину падения напряжения в цепи якоря:
Здесь: U — напряжение на зажимах; Е — ЭДС в режиме х.х.; IЯ — ток якоря; RЯ — сопротивление в цепи якоря. Падение напряжения в цепи якоря обычно не превышает 2-8 % ЭДС генератора. Уменьшение напряжения на выходе генератора связано с размагничиванием машины магнитным полем якоря, а также падением напряжения в его обмотках. В каждой машине постоянного тока имеет место взаимодействие между током якоря IЯ и магнитным потоком Ф. В результате на каждый проводник обмотки якоря действует электромагнитная сила:
где В — магнитная индукция, IЯ — ток в обмотке якоря, L — длина якоря. Направление действия этой силы определяется правилом левой руки. Подставим сюда среднее значение магнитной индукции ВСР и величину тока в каждом проводнике обмотки якоря I = IЯ / 2 а. Получим
Электромагнитный момент, действующий на якорь машины, при числе проводников обмотки N:
где — величина, постоянная для данной машины; d — диаметр якоря; р — число пар полюсов; N — число проводников обмотки якоря; а — число пар параллельных ветвей. При работе машины в режиме генератора электромагнитный момент действует против вращения якоря, т.е. является тормозным. Для привода генератора требуется электродвигатель мощность, которого должна покрыть все потери в генераторе:
где Р — полезная электрическая мощность генератора; DРЯ — потери в обмотке якоря; DРВ — потери в обмотке возбуждения; DРМ — потери на намагничивание машины; DРМЕХ — механические потери, связанные с трением вращающихся частей.
Коэффициент полезного действия генератора определяется отношением:
У современных генераторов постоянного тока коэффициент полезного действия составляет 90-92 %.
Расчет мощности электродвигателя для насоса
Выбор электродвигателя для насосной установки зависит от конкретных условий, прежде всего – от схемы водоснабжения. В большинстве случаев подача воды производится с помощью водонапорного бака или водонапорного котла. Для приведения в действие всей системы используются центробежные насосы с асинхронными двигателями.
Выбор оптимальной мощности насоса осуществляется в зависимости от потребности в подаче и напоре жидкости. Подача насоса QH измеряется в литрах, подаваемых в 1 час, и обозначается как л/ч. Данный параметр определяется по следующей формуле: Qн = Qmaxч = (kч х kсут х Qср.сут) / (24 η), где Qmaxч — возможный максимальный часовой расход воды, л/ч, kч – коэффициент неравномерности часового расхода, kсут — коэффициент неравномерности суточного расхода (1,1 – 1,3), η — КПД насосной установки, с учетом потерь воды), Qср.сут — значение среднесуточного расхода воды (л/сут).
Оптимальный напор воды должен обеспечивать ее подачу в установленное место при условии необходимого давления. Требуемые параметры напора насоса (Ннтр) зависят от высоты всасывания (Нвс) и высоты нагнетания (Ннг), которые в сумме определяют показатели статического напора (Нс), потери в трубопроводах (Hп) и разность давлений верхнего (Рву) и нижнего (Рну) уровней.
Исходя из того, что значение напора будет равно H = P/ρg, где Р — давление (Па), ρ — плотность жидкости (кг/м 3 ), g = 9,8 м/с2 — ускорение свободного падения, g — удельный вес жидкости (кг/м 3 ), получается следующая формула: Ннтр = Hc + Hп + (1/ρ) х (Рву – Рну).
После вычисления расхода воды и напора по каталогу уже можно выбрать насос с наиболее подходящими параметрами. Чтобы не ошибиться с мощностью электродвигателя, ее нужно определить по формуле: Pдв = (kз х ρ х Qн х Нн) / (ηн х ηп), где kз является коэффициентом запаса, зависящим от мощности электродвигателя насоса и составляет 1,05 – 1,7. Этот показатель учитывает возможные утечки воды из трубопровода из-за неплотных соединений, разрывов трубопровода и прочих факторов, поэтому электродвигатели для насосов должны иметь некоторый запас мощности. Чем больше мощность, тем меньше коэффициент запаса можно принять.
Расчет мощности двигателя формула для компрессора
Выбирая электродвигатель, наиболее подходящий для работы того или иного компрессора, необходимо учитывать продолжительный режим работы данного механизма и постоянную нагрузку. Расчет требующейся мощности двигателя Рдв осуществляется в соответствии с мощностью на валу основного механизма. В этом случае следует учитывать потери, возникающие в промежуточном звене механической передачи.
Дополнительными факторами являются мощности, назначение и характер производства, на котором будет эксплуатироваться компрессорное оборудование. Они оказывают определенное влияние, в связи с чем оборудование может потребовать незначительных, но постоянных регулировок для поддержки производительности на должном уровне.
Определить мощность двигателя можно по формуле:
, в которой:
- Q – значение производительности или подачи компрессора (м 3 /с);
- А – работа по совершению сжатия (Дж/м 3 );
- ηк – индикаторный КПД (0,6-0,8) для учета потерь мощности при реальном сжатии воздуха;
- ηп – механический КПД (0,9-0,95) учитывающий передачу между двигателем и компрессором;
- кз– коэффициент запаса (1,05-1,15) для учета факторов, не поддающихся расчетам.
Работа А рассчитывается по отдельной формуле: А = (Аи + Аа)/2, где Аи и Аа представляют собой соответственно изотермическое и адиабатическое сжатие.
Значение работы, которую необходимо совершить до появления требуемого давления, можно определить с помощью таблицы:
Типичная работа компрессора характеризуется продолжительным режимом работы. Реверсивные электроприводы, как правило, отсутствуют, включения и выключения крайне редкие. Поэтому наиболее оптимальным вариантом, обеспечивающим нормальную работу компрессоров, будет синхронный электрический двигатель.
7.5. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
В соответствии с принципом обратимости машина постоянного тока может работать как в качестве генератора, так и в качестве двигателя. Уравнение ЭДС для двигателя составлено на основании 2-го закона Кирхгофа с учетом направления ЭДС:
В соответствии о формулой Еа = Се Ф n частота вращения определяется выражением:
Подставим значение Е из уравнения U = Е — IЯ RЯ, получим:
т.е. частота вращения двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку возбуждения. Из этой формулы видно, что возможны пути регулирования частоты вращения двигателя постоянного тока: 1. Изменением напряжения сети U. Регулируя подаваемое напряжение Uсети можно менять частоту вращения. 2. Включением в цепь якоря добавочного сопротивлению (R’Я = RЯ + RДОБ). Изменяя сопротивление RДОБ, меняют частоту вращения. 3. Изменением магнитного потока Ф. Машины с постоянными магнитами не регулируются. Машины с электромагнитами позволяют регулировать поток Ф путем изменения тока возбуждения IB. На рис. 7.5.1. показана схема включения в сеть двигателя постоянного тока.
По закону электромагнитной индукции при прохождении тока по обмотке якоря происходит взаимодействие ее проводников с магнитным полем полюсов. На каждый проводник обмотки будет действовать электромагнитная сила Рэм = ВСРLI, пропорциональная магнитной индукции полюсов В, длине проводника L и току I, протекающему по проводнику. Направление действия этой силы определяется правилом правой руки. Не повторяя рассуждений, проведенных для генератора постоянного тока, запишем выражение для вращающего момента:
где CM — коэффициент пропорциональности. Вращающий момент у двигателей с независимым и параллельным возбуждением с увеличением нагрузки может как расти, так и уменьшаться, поскольку с ростом потребляемого тока I и размагничивания полюсов, уменьшается магнитный поток Ф.
Двигатели с последовательным возбуждением имеют отличные от вышеприведенных двигателей характеристики. Из схемы, приведенной на рис. 7.2.1 в, видно, что магнитный поток в машине создается обмоткой возбуждения, включенной последовательно с обмоткой якоря. Следовательно, IB = IЯ и выражение для вращающего момента будет иметь вид:
Последняя формула показывает, что чем больше нагрузка на двигатель, тем большим будет вращающий момент. Это обстоятельство делает двигатель с последовательным возбуждением незаменимым на электротранспорте (трамвае, троллейбусе и т.д.). Реверсирование или изменение направления вращения двигателей постоянного тока может осуществляться изменением полярности тока либо в обмотке якоря, либо в обмотке возбуждения.
Формула расчета для вентиляторов
Вентиляторы широко применяются в самых разных областях. Устройства общего назначения работают на чистом воздухе, при температуре ниже 80 . Воздух с более высокой температурой перемещается с помощью специальных термостойких вентиляторов. Если приходится работать в агрессивной или взрывоопасной среде, в этих случаях используются модели антикоррозийных и взрывобезопасных устройств.
В соответствии с принципом действия, вентиляторные установки могут быть центробежными или радиальными и осевыми. В зависимости от конструкции, они развивают давление от 1000 до 15000 Па. Поэтому мощность, потребная для привода вентилятора, рассчитывается в соответствии с давлением, которое необходимо создать.
С этой целью используется формула: Nв=Hв·Qв/1000·кпд, в которой Nв – мощность, потребная для привода (кВт), Hв – давление, создаваемое вентилятором (Па), Qв – перемещаемый объем воздуха (м 3 /с), кпд – коэффициент полезного действия.
Для расчета мощности электродвигателя используется формула:
, где значения параметров будут следующие:
- Q – производительность агрегата;
- Н – давление на выходе;
- ηв – коэффициент полезного действия вентилятора;
- ηп – коэффициент полезного действия передачи;
- кз – коэффициент запаса, зависящий от мощности электродвигателя. При мощности до 1 кВт кз = 2; от 1 до 2 кВт кз = 1,5; при 5 кВт и выше кз = 1,1-1,2.
Данная формула позволяет рассчитывать мощность электродвигателей под центробежные и осевые вентиляторы. Для центробежных конструкций КПД составляет 0,4-0,7, а для осевых – 0,5-0,85. Другие расчетные характеристики имеются в специальных каталогах для всех типов электродвигателей.
Запас мощности не должен быть слишком большим. Если он будет слишком большой, КПД привода заметно снизится. Кроме того, в двигателях переменного тока может снизиться коэффициент мощности.
Расчет пускового тока электродвигателя
В момент запуска электродвигателя его вал остается в неподвижном состоянии. Для того чтобы он начал раскручиваться, необходимо приложить усилие, значительно больше номинального. В связи с этим пусковой ток также превышает номинал. В процессе раскручивания вала происходит постепенное плавное уменьшение тока.
Влияние пусковых токов негативно сказывается на работе оборудования, в основном из-за резких провалов напряжения. Для того чтобы уменьшить их отрицательное воздействие, применяются различные способы. В процессе разгона, схемы электродвигателя переключаются со звезды на треугольник, используются частотные преобразователи и электронные устройства плавного пуска.
Вначале рассчитывается значение номинального тока двигателя, в соответствии с его типом и номинальной мощностью. Для устройств постоянного тока формула будет выглядеть следующим образом:
У электродвигателей переменного тока номинальный ток определяется по другой формуле:
Все параметры имеют соответствующие обозначения:
- РН – значение номинальной мощности двигателя;
- UH – значение номинального напряжения двигателя;
- ηH–КПД электродвигателя;
- cosfH – соответствует коэффициенту мощности двигателя.
После расчетов номинального тока можно вычислить значение пускового тока по формуле:
, в которой:
- IH – номинальное значение тока, определенное ранее;
- Кп–кратность постоянного тока к номиналу.
Значение пускового тока рассчитывается для каждого двигателя, имеющегося в электрической цепи. В соответствии с его величиной выбирается автоматический выключатель, обеспечивающий защиту всей цепи.
2.4.9. Электромеханическая постоянная времени исполнительных двигателей
Время разгона исполнительного двигателя определяется, главным образом, электромеханическими переходными процессами, т. к. из-за значительного активного сопротивления электромагнитные переходные процессы в них быстротечны. Электромеханическая постоянная времени примерно на порядок больше электромагнитной постоянной времени . Значение определяется из основного уравнения динамики для двигателя при условии разгона его ротора от неподвижного состояния до скорости холостого хода при статическом моменте на валу . При этих условиях основное уравнение динамики
принимает вид
,
| (2.105) |
где
— момент инерции ротора.
Обычно электромеханическую постоянную времени определяют исходя из пускового момента . Для идеализированного двигателя при прямолинейной механической характеристике
| , | (2.106) |
где
— скорость холостого хода.
Следовательно, можно записать
или
Решив это уравнение, получим
| , | (2.107) |
где
— электромеханическая постоянная
времени:
| (2.108) |
Физически электромеханическая постоянная времени представляет собой время, необходимое для разгона двигателя от неподвижного состояния до достижения скорости холостого хода при постоянном моменте на валу и . В действительности момент, действующий на вал ротора в процессе разгона уменьшается, вследствие чего время разгона до скорости оказывается большим .
В двигателе с амплитудным управлением
| , | (2.109) |
где
— синхронная скорость, соответствующая круговому вращающемуся полю и пусковому моменту .
Поэтому
| . | (2.110) |
Из этого выражения следует, что при амплитудном управлении постоянная времени растет с уменьшением эффективного коэффициента сигнала, т. к. уменьшается величина пускового момента. При фазовом управлении и . Поэтому
| . | (2.111) |
Следовательно, при этом способе управления постоянная времени не зависит от коэффициента сигнала . Это объясняется тем, что при фазовом управлении механические характеристики параллельны — при уменьшении коэффициента сигнала пропорционально ему уменьшается момент при пуске и скорость холостого хода. В результате время разгона не изменяется. При амплитудном же управлении уменьшение сигнала приводит к такому же уменьшению момента, но скорость холостого хода уменьшается в меньшей степени. Так, например, при коэффициенте сигнала пусковой момент в 2 раза меньше, чем при , а скорость холостого хода составляет 0,8 от скорости при . Естественно, что время разгона двигателя с уменьшением коэффициента сигнала растет.
Из выражений для постоянной времени следует, что она зависит от отношения и скорости . Она возрастает с увеличением момента и частоты питающей сети. При увеличении числа полюсов величина уменьшается. Двигатели, рассчитанные на работу при пониженной частоте, несмотря на то, что они обычно выполняются многополюсными, имеют большую постоянную времени, чем машины, рассчитанные на работу при частоте 50 Гц.
назад | оглавление | вперед
Режимы работы электродвигателей
Нагрузка на электродвигатель определяется режимом его работы. Она может оставаться неизменной или изменяться в зависимости от условий эксплуатации. При выборе двигателя обязательно учитывается характер и значение предполагаемой нагрузки. С учетом этого фактора выполняется расчет мощности электродвигателя.
Режимы, в которых работают электродвигатели:
- S1 – продолжительный режим. Нагрузка не меняется в течение всего периода эксплуатации. Температура двигателя достигает установленного значения.
- S2 – кратковременный режим. В этом случае в период работы температура не успевает достигнуть нужного значения. При отключении происходит охлаждение двигателя до температуры окружающей среды.
- S3 – периодически-кратковременный режим. В процессе работы двигателя производятся периодические отключения. В эти периоды температура двигателя не может достигнуть нужного значения или стать такой же, как в окружающей среде. При расчетах двигателя, в том числе и мощности, учитываются все паузы и потери, их продолжительность. Одним из важных критериев выбора агрегата, считается допустимое число включений за определенный отрезок времени.
- S4 – периодически-кратковременный режим с частыми пусками.
- S5 – периодически-кратковременный режим с электрическим торможением. Оба режима S4 и S5 работают также, как и S3.
- S6 – периодически-непрерывный режим с кратковременной нагрузкой. Эксплуатация двигателя осуществляется под нагрузкой, которая чередуется с холостым ходом.
- S7 – периодически-непрерывный режим с электрическим торможением.
- S8 – периодически-непрерывный режим, в котором одновременно изменяется нагрузка и частота вращения.
- S9–режим, когда нагрузка и частота вращения изменяются не периодически.
Источник
7.2. СПОСОБЫ ВОЗБУЖДЕНИЯ МАШИН ПОСТОЯННОГО ТОКА
Возбуждение — это понятие, связанное с созданием основного магнитного поля машины. В машинах с электромагнитным возбуждением основное поле создается обмотками возбуждения. Имеются конструкции, в которых возбуждение создается постоянными магнитами, размещенными на статоре. Различают четыре схемы включения статорных обмоток: с независимым, параллельным, последовательным и смешанным возбуждением (рис. 7.2.1).
Изображения под пунктами б, в, г на рис. 7.2.1, называются схемами с самовозбуждением. Процесс самовозбуждения происходит за счет остаточной намагниченности полюсов и станины. При вращении якоря в этом, небольшом по величине, магнитном поле (ФОСТ = 0,02 0,03 ФО) индуцируется ЭДС — ЕОСТ. Поскольку обмотка возбуждения подключена через щетки к якорю, то в ней будет протекать ток. Этот ток усилит магнитное поде полюсов и приведет к увеличению ЭДС якоря. Большая ЭДС вновь увеличит ток возбуждения и произойдет нарастание магнитного потока до полного намагничивания машины.