Подписка на рассылку
Производственные процессы, связанные с эксплуатацией оборудования, оснащенного электрическими двигателями переменного или постоянного тока, требуют периодической остановки. Однако после отключения питающего напряжения от электродвигателей, их роторы продолжают вращение по инерции и останавливаются только через определенный промежуток времени. Такая остановка электродвигателя называется свободным выбегом.
Для электродвигателей, работающих с частыми пусками-остановами, остановка способом свободного выбега не подходит. Чтобы сократить время, необходимое для полной остановки вращения ротора применяется принудительное торможение. Способы торможения электродвигателя подразделяются на механические и электрические.
Механическое торможение
Остановка двигателей при таком способе торможения осуществляется благодаря специальным колодкам на тормозном шкиве. После отключения питающего напряжения тормозные колодки под воздействием пружин прижимаются к шкиву. В результате возникающего трения колодок о шкив кинетическая энергия вращающегося вала преобразуется в тепловую, что и приводит к его полной остановке. После подачи напряжения электромагнит (YB) растормаживает колодки, и эксплуатация электродвигателя продолжается в штатном режиме.
В зависимости от схемы электрического торможения, кинетическая энергия вращающегося ротора может отдаваться в сеть или на батарею конденсаторов, а также преобразовываться в тепло, которое поглощается обмотками электродвигателя или специальными реостатами.
Динамическое торможение электродвигателя
Эта схема остановки подходит для трехфазных электродвигателей как с которкозамкнутым, так и с фазным ротором.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется посредством отключения обмоток статора от питающей сети трехфазного переменного тока и переключением двух из них через систему контакторов и реле на источник выпрямленного постоянного напряжения.
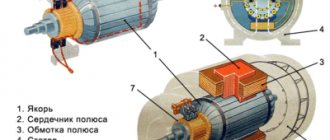
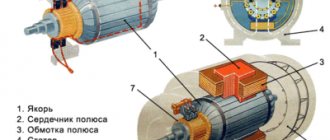
Обмотки статора после подачи на них постоянного напряжения генерируют стационарное магнитное поле, под воздействием которого в короткозамкнутой «беличьей клетке»
вращающегося ротора начинает индуцироваться электрический ток, вызывающий появление томозного момента. Направление этого момента противоположно направлению вращения останавливающегося вала. После остановки двигателя подача постоянного напряжения на обмотки статора прекращается.
В двигателях с фазным ротором величину тормозного момента можно регулировать с помощью дополнительных сопротивлений, в качестве которых используются пусковые резисторы.
Торможение противовключением
Торможение асинхронного электродвигателя методом противовключения осуществляется путем реверсирования двигателя без отключения от питающей сети.
Управление торможением выполняется реле контроля скорости. В рабочем режиме контакты реле замкнуты. После нажатия на кнопку «СТОП» (SBC) группа контакторов производит переключение двух фаз, меняя порядок их чередования. В результате этого магнитное поле статора начинает вращаться в противоположном направлении, что приводит к замедлению вращения ротора. Когда скорость вращения становится близкой к нулю, реле контроля скорости размыкает контакты и подача питающего напряжения прекращается.
Конденсаторное торможение электродвигателей
Этот способ, называемый еще торможение с самовозбуждением, применим только к электродвигателям с короткозамкнутым ротором.
После прекращения подачи питающего напряжения ротор электродвигателя продолжает вращение по инерции и генерирует в обмотках статора электрический ток, который вначале заряжает батарею конденсаторов, а после накопления номинального заряда возвращается в обмотки. Это приводит к возникновению тормозного момента, величина которого зависти от емкости конденсаторных батарей, подключенных к каждой фазе по схеме «звезда» или «треугольник». Торможение с самовозбуждением применяется на двигателях с большим числом пусков-остановов, так как величина потерь энергии в двигателях при такой схеме остановки минимальная.
Рекуперативное торможение
Рекуперативное или иначе генераторное торможение асинхронных электродвигателей на практике используется в качестве предварительного подтормаживания , а также при опускании грузов кранами всех типов или пассажирских и грузовых лифтовых кабин.
Торможение асинхронного электродвигателя в рекуперативном режиме происходит, когда номинальная частота вращения ротора превышает его синхронную частоту. Двигатель начинает генерировать электрическую энергию и отдавать ее в питающую сеть, в результате чего создается тормозящий момент. Такой способ остановки применяется для многоскоростных двигателей путем постепенного переключения с большей частоты вращения ротора на меньшую. Таким образом, в определенный момент скорость, вращающегося под воздействием инерции вала, будет больше синхронной частоты, соответствующей подключенному количеству полюсов статора. Кроме того, рекуперативная схема торможения применяется для двигателей, подключенных к преобразователям частоты. Для этого достаточно уменьшить частоту питающего напряжения.
Остановка двигателей постоянного тока (ДПТ)
Торможение электродвигателей постоянного тока осуществляется противовключением и динамическим способом.
Динамическое торможение
Такая схема торможения применяется для двигателей с независимым возбуждением.
После нажатия кнопки «Стоп» (SB1) происходит отключение обмоток якоря от питающей сети и переподключение их на тормозной резистор. В обмотках якоря, вращающегося по инерции в стационарном магнитном поле, индуцируется постоянный ток, который проходя по обмоточным проводам резистора, преобразовывается в тепловую энергию.
Торможение противовключением Метод противовключения основан на изменении полярности напряжения, подключаемого к обмоткам индуктора или якоря двигателя. Это приводит к смене полярности магнитного потока или направлению тока, индуцируемого в якоре. Таким образом, направление вращающего момента меняется на противоположное, что вызывает появление тормозящего эффекта. Скорость вращения якоря контролируется реле скорости, которое отключает питание якоря, когда она приближается к нулевой.
Источник
Способы и схемы торможения электродвигателей
Торможение электродвигателя применяют, если необходимо сократить время свободного выбега и фиксацию механизма в конкретном положении. Существует несколько видов принудительной остановки устройства. Это механическое, электрическое и комбинированное. Механическое устройство представляет собой тормозной шкив, закрепленный на валу, с колодками. После отключения устройства колодки прижимаются к шкиву. За счет трения кинетическая энергия преобразуется в тепловую, т.е. происходит процесс торможения. Остальные способы и схемы торможения электрического двигателя будут рассмотрены далее в статье.
Производственные процессы, связанные с эксплуатацией оборудования, оснащенного электрическими двигателями переменного или постоянного тока, требуют периодической остановки. Однако после отключения питающего напряжения от электродвигателей, их роторы продолжают вращение по инерции и останавливаются только через определенный промежуток времени. Такая остановка электродвигателя называется свободным выбегом.
Для электродвигателей, работающих с частыми пусками-остановами, остановка способом свободного выбега не подходит. Чтобы сократить время, необходимое для полной остановки вращения ротора применяется принудительное торможение. Способы торможения электродвигателя подразделяются на механические и электрические.
Механическое торможение
Остановка двигателей при таком способе торможения осуществляется благодаря специальным колодкам на тормозном шкиве. После отключения питающего напряжения тормозные колодки под воздействием пружин прижимаются к шкиву. В результате возникающего трения колодок о шкив кинетическая энергия вращающегося вала преобразуется в тепловую, что и приводит к его полной остановке. После подачи напряжения электромагнит (YB) растормаживает колодки, и эксплуатация электродвигателя продолжается в штатном режиме.
В зависимости от схемы электрического торможения, кинетическая энергия вращающегося ротора может отдаваться в сеть или на батарею конденсаторов, а также преобразовываться в тепло, которое поглощается обмотками электродвигателя или специальными реостатами.
Динамическое торможение электродвигателя
Эта схема остановки подходит для трехфазных электродвигателей как с которкозамкнутым, так и с фазным ротором.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется посредством отключения обмоток статора от питающей сети трехфазного переменного тока и переключением двух из них через систему контакторов и реле на источник выпрямленного постоянного напряжения.
Обмотки статора после подачи на них постоянного напряжения генерируют стационарное магнитное поле, под воздействием которого в короткозамкнутой «беличьей клетке»
вращающегося ротора начинает индуцироваться электрический ток, вызывающий появление томозного момента. Направление этого момента противоположно направлению вращения останавливающегося вала. После остановки двигателя подача постоянного напряжения на обмотки статора прекращается.
В двигателях с фазным ротором величину тормозного момента можно регулировать с помощью дополнительных сопротивлений, в качестве которых используются пусковые резисторы.
Торможение противовключением
Торможение асинхронного электродвигателя методом противовключения осуществляется путем реверсирования двигателя без отключения от питающей сети.
Управление торможением выполняется реле контроля скорости. В рабочем режиме контакты реле замкнуты. После нажатия на кнопку «СТОП» (SBC) группа контакторов производит переключение двух фаз, меняя порядок их чередования. В результате этого магнитное поле статора начинает вращаться в противоположном направлении, что приводит к замедлению вращения ротора. Когда скорость вращения становится близкой к нулю, реле контроля скорости размыкает контакты и подача питающего напряжения прекращается.
Схемы торможения двигателей постоянного тока
При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
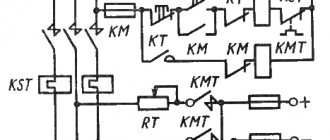
Для управления моментом ДПТ с заданием времени в режиме динамического торможения применяется узел схемы, приведенный на рис. 1, а, составленный для управления торможением ДПТ с независимым возбуждением с одной ступенью тормозного резистора R2.
Рис. 1. Схема, осуществляющая одноступенчатое (а) и трехступенчатое (б) динамическое торможение двигателя постоянного тока с управлением по времени и пусковая диаграмма трехступенчатого торможения (в).
Команда на перевод ДПТ в режим динамического торможения в приведенной схеме подается от кнопки SB1. При этом линейный контактор КМ1 отключает якорь двигателя от напряжения сети, а тормозной контактор КМ2 подключает к нему тормозной резистор. Команду на отсчет времени процесса динамического торможения для реле торможения КТ подает линейный контакторам КМ1, выполняющий предыдущую операцию в схеме перед началом динамического торможения. В качестве тормозного реле используется электромагнитное реле времени постоянного тока.
Схема может применяться для управления ДПТ с независимым возбуждением и ДПТ с последовательным возбуждением, но в последнем случае — с реверсом тока в последовательной обмотке возбуждения.
Рекуперативное торможение электродвигателя постоянного тока
Данный вид торможения применяется в том случае, если включенный электродвигатель вращается со скоростью, значительно превышающей допустимую скорость холостого хода. Во время репродуктивного торможения электромотор также начинает работу в качестве генератора и отдает электрическую энергию в сеть.
Тормозной момент одновременно возникает на валу. Режим применяется в приводах грузоподъемных механизмов, когда происходит опускание груза. Также допустимо применять рекуперативное торможение электродвигателя во время регулирования скорости вращения. Отличает такой способ высокая степень экономичности, так как электроэнергия возвращается в сеть.
Торможение двигателей постоянного тока
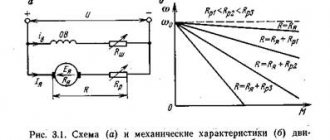
Для быстрого торможения двигателя его переводят в режим, при котором электромагнитный момент изменяет направление. Различают три способа торможения: 1) динамическое; 2) генераторное (рекуперативное); 3) противовключением.
При динамическом торможении якорь отключают от питающего напряжения и замыкают на реостат R
т (рис.
а
). Из уравнения для якорной цепи 0 =
Е
+ (
R
я +
R
т)
I
я следует, что ток
I
я, а значит и момент
М
, изменяют направление (рис.,
б
). Поскольку частота
n
не может изменяться скачком, то в момент переключения рабочая точка из
а
1 по горизонтали переходит в
а
2 и затем, замедляясь по наклонной прямой, в точку останова 0.
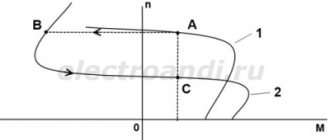
Рекуперативное торможение происходит при наличии условия E
>
U
. Из уравнения
U
=
E
+
I
я
R
я следует, что при этом
I
я, а значит и
M
, становятся отрицательными, что может наблюдаться при спуске двигателем груза или ходе под уклон трамвая. Якорь может набрать частоту
n
>
n
. На рис. 3.82,
в
это соответствует движению рабочей точки из позиции
а
1, через точку
n
в
а
2, т. е. переходу машины из двигательного режима (
M
> 0) в генераторный (
M
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник