Двигатель постоянного тока. Схемы соединения и характеристики ДПТ
Двигатель постоянного тока нашел широкое применение в различных областях деятельности человека. Начиная от использования тягового привода, применяемого в трамваях и троллейбусах, заканчивая приводом прокатных станов и подъемных механизмов, где требуется поддержание высокой точности скорости вращения.
Основные положительные особенности, которые отличают ДПТ от асинхронного двигателя:
| — гибкие пусковые и регулировочные характеристики; |
| — двухзонное регулирование, которое позволяет достигать скорости вращения более 3000 об/мин. |
Отрицательные черты:
| — сложность в изготовлении и высокая стоимость; |
| — в процессе работы необходимо постоянное обслуживание, так как коллектор и токосъемные щетки имеют небольшой ресурс работы. |
Двигатель постоянного тока применяют только тогда, когда применение двигателя переменного тока невозможно или крайне нецелесообразно. В среднем, на каждые 70 двигателей переменного тока приходится всего лишь 1 ДПТ.
Конструкция ДПТ
Двигатель постоянного тока состоит из:
| — индуктора (статора); |
| — якоря (ротора); |
| — коллектора; |
| — токосъемных щеток; |
| — конструктивных элементов. |
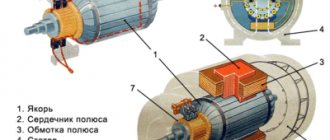
Якорь и индуктор разделены между собой воздушным зазором. Индуктор представляет из себя станину, которая служит для того, чтобы закрепить основные и добавочные полюса магнитной системы двигателя. На основных полюсах располагаются обмотки возбуждения, а на добавочных – специальные обмотки, которые способствуют улучшению коммутации.
Коллектор подводит постоянный ток к рабочей обмотке, которая уложена в пазы ротора. Коллектор имеет вид цилиндра и состоит из пластин, изолированных друг от друга, он насажен на вал двигателя. Щетки служат для съема тока с коллектора, они крепятся в щеткодержателях для обеспечения правильного положения и надежного нажатия на поверхность коллектора.
Рисунок 1 – Конструкция двигателя постоянного тока
Двигатели постоянного тока классифицируют по магнитной системе статора:
1) ДПТ с постоянными магнитами;
2) ДПТ с электромагнитами:
| — ДПТ с независимым возбуждением; |
| — ДПТ с последовательным возбуждением; |
| — ДПТ с параллельным возбуждением; |
| — ДПТ со смешанным возбуждением. |
Рисунок 2 – Схемы подключения двигателя постоянного тока
Схема подключения обмоток статора существенно влияет на электрические и тяговые характеристики привода.
Пуск двигателя постоянного тока
Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
| — при необходимости плавного разгона электродвигателя; |
| — в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление). |
Только ДПТ мощностью до 1 кВт допускают к старту без пусковых реостатов, так называемый «прямой пуск».
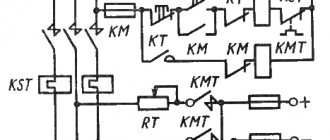
Рисунок 3 – Реостатный пуск двигателя с 3 ступенями
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Регулирование скорости вращения
Частота вращения двигателя постоянного тока выражается формулой:
Это выражение так же называется электромеханической характеристикой ДПТ, в которой:
| U – питающее напряжение; |
| Iя – ток в якорной обмотке; |
| Rя – сопротивление якорной цепи; |
| k – конструктивный коэффициент двигателя; |
| Ф – магнитный поток двигателя. |
Формула момента двигателя:
Подставив в формулу электромеханической характеристики,получим:
Таким образом, исходя из приведенных формул, сделаем вывод, что скорость вращения ДПТ можно регулировать, изменяя сопротивление якоря, питающее напряжение и магнитный поток.
История.
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлова. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Устройство электродвигателя
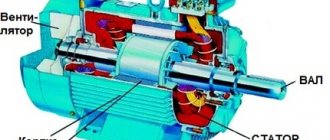
Основные элементы, из которых состоит типичный трехфазный двигатель таковы:
- Корпус, имеющий ножки, которыми он крепится к фундаменту;
- Статор, напоминающий по строению простой трансформатор. Имеет сердечник и обмотку При подаче тока создается вихревое электромагнитное поле.
- Ротор. Основная вращающаяся часть.
- Вал, на который жестко насажен ротор. Передняя часть выходит наружу, имеет шпоночную борозду под шестерни или шкив. На заднюю часть, выходящую за пределы корпуса насаживается крыльчатка для охлаждения и обдува.
- Подшипки, находящиеся в нишах передней и задней крышки.
- Герметичная клеммная коробка.
Классификация МПТ по способу питания обмоток индуктора и якоря
По данному признаку МПТ делятся на 4 вида.
С независимым возбуждением
Обмотки индуктора и якоря не имеют электрического соединения. У генераторов этого типа обмотку возбуждения питает сеть постоянного тока, аккумулятор или специально предназначенный для этого генератор — возбудитель. Мощность последнего — несколько сотых мощности основного генератора.
Область применения генераторов с независимым возбуждением:
- системы значительной мощности, где напряжение на обмотке возбуждения существенно отличается от генерируемого;
- системы регулирования скорости вращения двигателей, запитанных от генераторов.
У двигателей с независимым возбуждением запитана и якорная обмотка. В основном это также агрегаты большой мощности.
Независимость обмотки индуктора позволяет удобнее и экономичнее регулировать ток возбуждения. Еще одна особенность таких моторов — постоянство магнитного потока возбуждения при любой нагрузке на валу.
С параллельным возбуждением
Обмотки индуктора и якоря соединены в одну цепь параллельно друг другу. Генераторы этого типа обычно применяются для средних мощностей. При параллельном соединении генерируемое устройством напряжение подается на обмотку возбуждения. При соединении в одну цепь обмоток индуктора и якоря говорят о генераторе с самовозбуждением.
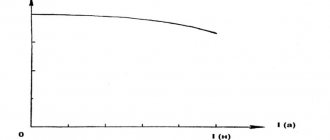
По своим характеристикам они идентичны моторам с независимым возбуждением и обладают следующими особенностями:
- при изменении нагрузки частота вращения практически не трансформируется: замедление составляет не более 8% при переводе от холостого хода к номинальной нагрузке;
- можно с минимальными потерями регулировать частоту вращения, причем в широких пределах — 2-кратно, а у специально сконструированных моторов и 6-кратно.
Индуктор вращающегося двигателя с параллельным возбуждением нельзя отсоединять от цепи якоря, даже если он уже отключен. Это приведет к наведению значительной ЭДС в обмотке возбуждения с последующим выходом мотора из строя. Находящийся рядом персонал может получить травму.
С последовательным возбуждением
Обмотки соединены в цепь последовательно друг другу. Через обмотку возбуждения течет ток якоря. Генераторы этого типа почти не применяются, поскольку процесс самовозбуждения происходит достаточно бурно и устройство не способно обеспечить необходимое большинству потребителей постоянство напряжения. Их используют только в специальных установках.
Схема последовательного возбуждения
Двигатели этого типа широко применяют в качестве тяговых (электровозы, троллейбусы, краны и пр.): по сравнению с аналогами параллельного возбуждения, при нагрузке они дают более высокий момент с одновременным уменьшением скорости вращения. Пусковой момент также высок.
Запуск двигателя с нагрузкой ниже 25% номинальной, а тем более на холостом ходу, недопустим: частота вращения окажется чересчур высокой, и агрегат выйдет из строя.
С параллельно-последовательным (смешанным) возбуждением
Существует два вида схемы:
- основная обмотка индуктора включена параллельно с якорной, вспомогательная — последовательно;
- основная обмотка индуктора включена последовательно с якорной, вспомогательная — параллельно.
Схемы систем возбуждения МПТ
Подключение параллельной обмотки до последовательной называют «коротким шунтом», за последовательной — «длинным шунтом». Генераторы этого типа применяются крайне редко.
Двигатели сочетают в себе достоинства аналогов с параллельным и последовательным возбуждением: способны работать на холостом ходу и при этом развивают значительное тяговое усилие. Но и они сегодня почти не применяются.
Как работает синхронный электродвигатель
Синхронные машины применяют часто в качестве генераторов. Он синхронно работают с частотой сети, поэтому он с датчиком положения инвертора и ротора, является электронным аналогом коллекторного электродвигателя постоянного тока.
Строение синхронного электродвигателя
Свойства
Эти двигатели не являются механизмами самозапускающимися, а требуют внешнего воздействия для того, чтобы набрать скорость. Применение они нашли в компрессорах, насосах, прокатных станках и подобном оборудовании, рабочая скорость которого не превышает отметки пятьсот оборотов в минуту, но требуется увеличение мощности. Они достаточно большие по габаритам, имеют «приличный» вес и высокую цену.
Запустить синхронный электродвигатель можно несколькими способами:
- Используя внешний источник тока.
- Пуск асинхронный.
В первом случае, с помощью мотора вспомогательного, в качестве которого выступать может электродвигатель постоянного тока или индукционный трехфазный мотор. Изначально ток постоянный на мотор не подается. Он начинает вращаться, достигая близкой к синхронной скорости. В этот момент подается постоянный ток. После замыкания магнитного поля, разрывается связь с вспомогательным двигателем.
Во втором варианте необходима установка в полюсные наконечники ротора дополнительной короткозамкнутой обмотки, пересекая которую магнитное вращающееся поле индуцирует токи в ней. Они, взаимодействуя с полем статора, вращают ротор. Пока он не достигнет синхронной скорости. С этого момента крутящий момент и ЭДС уменьшаются, магнитное поле замыкается, сводя к нулю крутящий момент.
Эти электродвигатели менее чувствительны, чем асинхронные, к колебаниям напряжения, отличаются высокой перегрузочной способностью, сохраняют неизменной скорость при любых нагрузках на валу.
Плюсы – минусы
Технические характеристики асихронных электродвигателей с короткозамкнутым ротором настолько превосходят показатели синхронных, что большинство приводов сделаны на их основе.
Плюсы таких устройств таковы:
- Надежность, простота конструкции, долговечность;
- Отсутствие сложностей в ремонте и обслуживании;
- Переключением 2-х фаз можно заставить вал вращаться в противоположную сторону;
- Применение в качестве генератора.
Недостатки или минусы также имеются:
- При неправильной фазировке, вал может вращаться в ненужную сторону и заклинить прочую механику (шестерни);
- Пусковой ток, превышающий номинальный до пяти раз;
- Скорость разгонки и торможения. На некоторые устройства с большой инерцией нужны движки большей мощности.
- При обрыве фазы, двигатель может сгореть если своевременно не отключить подачу напряжения.
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»)
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки бесколлекторных электродвигателей
В отличие от описанных, у этих электродвигателей подвижной частью является статор с постоянным магнитом (корпус), а ротор с трехфазной обмоткой – неподвижен.
К недостаткам этих двигателей постоянного тока отнести можно менее плавную регулировку скорости вращения вала, но зато они способны за доли секунды набрать максимальные обороты.
Бесколлекторный электродвигатель помещен в закрытый корпус, поэтому он более надежен при неблагоприятных условиях эксплуатации, т.е. ему не страшны пыль и влага. К тому же, его надежность возрастает благодаря отсутствию щеток, как и скорость, с которой вращается вал. При этом, по конструкции мотор более сложен, следовательно, не может быть дешевым. Стоимость его в сравнении с коллекторным, выше в два раза.
Таким образом, коллекторный электродвигатель, работающий на переменном и на постоянном токе, является универсальным, надежным, но более дорогим. Он и легче, и меньше по размерам двигателя переменного тока той же мощности.
Поскольку электродвигатели переменного тока, питающиеся от 50 Гц (питание промышленной сети) не позволяют получать высокие частоты (выше 3000 об/мин), при такой необходимости, используют коллекторный двигатель.
Между тем, его ресурс ниже, чем у асинхронных электродвигателей переменного тока, который зависит от состояния подшипников и изоляции обмоток.
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств
В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Классификация
Все трехфазные электродвигатели можно разбить на две группы:
Синхронные. Вращаются со скоростью постоянного магнитного поля. Для повышения мощности, ротор изготовляется по принципу трансформатора – имеет обмотки и сердечник. Напряжение подается через угольные щетки на кольца коллектора (контакты), закрепленного на валу, а уж потом – на катушки ротора.
Асинхронные, с короткозамкнутым ротором. Вращательный импульс идет от возбуждения катушек статора. Короткозамкнутые витки выполнены в виде беличьего колеса. Ротор вращается со скоростью ниже, чем электромагнитное поле статора. Отсюда и его название.
Классификация электродвигателей
- Двигатель постоянного тока
постоянным током ; Коллекторные двигатели постоянного тока. Разновидности: С возбуждением постоянными магнитами; - С параллельным соединением обмоток возбуждения и якоря;
- С последовательным соединением обмоток возбуждения и якоря;
- Со смешанным соединением обмоток возбуждения и якоря;
- Двигатель переменного тока
— электрический двигатель, питание которого осуществляется переменным током , имеет две разновидности: Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения; - Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением.
- Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
- Многофазные
- Шаговые двигатели — Электродвигатели, которые имеют конечное число положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
- Вентильные двигатели — Электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора).
- Универсальный коллекторный двигатель (УКД) — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе.
Из-за связи с низкой частотой сети (50 Герц) асинхронные и синхронные двигатели имеют больший вес и размеры, чем коллекторный двигатель постоянного тока и универсальный коллекторный двигатель той же мощности. При применении выпрямителя и инвертора с частотой значительно большей 50 Гц вес и размеры асинхронных и синхронных двигателей приближаются к весу и размерам коллекторного двигателя постоянного тока и универсального коллекторного двигателя той же мощности.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Коллекторные машины
Однако у синхронных и асинхронных электромоторов есть один непреодолимый недостаток – частота питающего напряжения. Она определяет скорость вращения магнитного поля и вала в этих двигателях. Никакими конструктивными изменениями в них при заданной частоте питающего напряжения невозможно получить частоту вращения вала большую, чем частота питающего напряжения. При необходимости большего числа оборотов используются коллекторные электромоторы.
В этих двигателях происходит постоянное переключение обмоток ротора коллектором. Каждая обмотка по сути это рамка с током, которая, как известно из опытов Фарадея, поворачивается в магнитном поле. Но одна рамка повернётся и остановится. Поэтому рамок — обмоток сделано несколько и каждой из них соответствует пара пластин в коллекторе. Ток подаётся через щётки, скользящие по коллектору.
Конструкция такого электромотора позволяет работать от источника либо постоянного, либо переменного напряжения, который обеспечивает ток и в статоре и в роторе. При переменном напряжении направление тока в статоре и роторе изменяется одновременно и поэтому направление действия силы вращающей ротор сохраняется. Частота питающего напряжения никак не влияет на частоту вращения ротора. Она зависит только от величины напряжения, питающего электромотор. Скользящий контакт щётки с коллектором ограничивает возможности этих электродвигателей по сроку службы и месту применения, поскольку искрение в щётках довольно быстро разрушает скользящий контакт и недопустимо в условиях повышенной взрывоопасности.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
Ссылки
Wikimedia Foundation . 2010 .
Смотреть что такое «Электродвигатель переменного тока» в других словарях:
- электродвигатель переменного тока
— — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN ас motor …
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Машина переменного тока, предназначенная для работы в режиме двигателя (см. Переменного тока машина). П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели (См. Синхронный электродвигатель) применяют в… …
Электрическая машина, применяемая для получения переменного тока (генератор) или для преобразования электрической энергии в механическую (двигатель) либо в электрическую энергию другого напряжения или частоты (преобразователь) П. т. м.… … Большая советская энциклопедия
Машина перем. тока, предназнач. для работы в режиме двигателя. П. т. э. подразделяют на синхронные и асинхронные. Синхронные электродвигатели применяют в электроприводах в осн. тогда, когда требуется постоянство угловой скорости. Из асинхронных… … Большой энциклопедический политехнический словарь
электропривод переменного тока
— электропривод постоянного [переменного] тока Электропривод, содержащий электродвигатель постоянного [переменного] тока. [ГОСТ Р 50369 92] Тематики электропривод EN ac drivealternating current drive DE Wechselstromantrieb … Справочник технического переводчика
электропривод постоянного (переменного) тока
— 3.1.3 электропривод постоянного (переменного) тока: Привод, содержащий электродвигатель постоянного (переменного) тока и редуктор;
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
на постоянном напряжении и токе работают:
- коллекторные;
- униполярные;
- шаговые.
Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора
Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.
обмотки статора выполняют функцию фиксирующего элемента
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
- морозильное или холодильное оборудование (компрессоры);
- электропривод;
- системы нагрева воздуха, его кондиционирования или вентиляции.
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки (уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор
Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
ДПР
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера, требующего для управления двигателем огромного количества вычислительных операций.
Особенности и устройство ДПТ
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.
История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока. Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
В последующие десятилетия такие машины из-за развития трехфазного переменного тока потеряли свою значимость в крупномасштабном машиностроении. Синхронные машины и системы с низким уровнем обслуживания асинхронного двигателя заменили их во многих устройствах.
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.
Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
Обе конструкции называются двигателями постоянного тока с внешним возбуждением. Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу [F], зависящую от тока [I] и напряжённости магнитного поля [B]. Токопроводящий проводник окружен круговым магнитным полем. Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.
Обмотка якоря состоит из двух половин катушки. Если применить напряжение постоянного тока к двум концам обмотки якоря, можно представить, что движущиеся носители заряда поступают в нижнюю половину катушки из верхней половины катушки.
Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки. Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора). Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество. Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Условные обозначения двигателей постоянного тока серии П.
П Х1 Х2 Х3 М П – машина постоянного тока; Х1 – исполнение по степени защиты и способу охлаждения. Без буквы – брызгозащищенный с самовентиляцией 1-6 габарит. Б – закрытое исполнение с естественным охлаждением 1-4 габарит; Х2 – габарит электрической машины. 1-1 габарит, 2-2 габарит, 3-3 габарит, 4-4 габарит, 5-5 габарит, 6-6 габарит; Х3 – условная длина сердечника якоря. 1 – первая длина, 2 – вторая длина; М – морское исполнение;
По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611. Двигатели постоянного тока могут быть изготовлены с присоединенным тахогенератором.
Условия эксплуатации электродвигателей постоянного тока П51, П52.
- Двигатели постоянного тока П51, П52 выпускаются для работы при температуре окружающей среды от -40°С до +40°С.
- При температуре окружающей среды 20° ± 5°С % относительная влажность 95°±3°С%.
- Выдерживают — вибрацию, ударные сотрясения, долговременные наклоны оси электродвигателя постоянного тока от 45° в любую сторону и при качке до 45° с периодом качки 7-9 с.
Возбуждение двигателя постоянного тока последовательное, параллельное, смешанное, независимое. Класс нагревостойкости изоляция электродвигателя постоянного тока — Н. Общий уровень вибрации электродвигателей и уровня интенсивности воздушного шума соответствуют всем принятым нормам.
Габаритные и присоединительные размеры двигателей постоянного тока П51, П52, ПБ51, ПБ52
| Тип двигателей постоянного тока | Размеры, мм | Масса, кг при IM2101, IM2102, IM3601, IM2103, IM2104, IM3611, IM3631 | Масса, кг при IM1001, IM1004 | ||||||
| b10 | d1 | d20 | d30 | l10 | l30 | h | |||
| П51У4 | 264 | 35 | 255 | 352 | 225 | 606 | 180 | 122 | 115 |
| ПБ51У2 | 638 | 127 | 120 | ||||||
| П52У4 | 264 | 35 | 255 | 352 | 265 | 646 | 180 | 142 | 135 |
| ПБ52У2 | 678 | 147 | 140 |
Основные технические характеристики двигателей постоянного тока П51, П52
| Тип | Мощность, кВт | Напряжение В | Ток сети А | Частота вращения, об/мин | КПД % |
| П51М | 2,7 | 110 | 33 | 750/1500 | 71 |
| 2,7 | 220 | 17,2 | 750/1500 | 74 | |
| 4,2 | 110 | 52,2 | 1000/2000 | 73 | |
| 4,2 | 220 | 25,6 | 1000/2000 | 74,5 | |
| 7,4 | 110 | 83,6 | 1500/2250 | 79,5 | |
| 7,4 | 220 | 41,8 | 1500/2250 | 80 | |
| 14,5 | 110 | 153 | 3000/3300 | 85 | |
| 14,5 | 220 | 77,3 | 3000/3300 | 85 | |
| П52М | 3,4 | 220 | 20,8 | 750/1500 | 74,5 |
| 5 | 110 | 58,5 | 1000/2000 | 77 | |
| 5 | 220 | 29,2 | 1000/2000 | 77 | |
| 8,8 | 110 | 97,8 | 1500/2250 | 81,5 | |
| 8,8 | 220 | 48 | 1500/2250 | 82,5 | |
| 16 | 220 | 84,5 | 2800 | 86 | |
| 20 | 220 | 104 | 3000/3300 | 87 |
Электродвигатели постоянного тока серии П 1, 2, 3, 4 габаритовЭлектродвигатели постоянного тока серии П51, П52Электродвигатели постоянного тока серии П61, П62Двигатели постоянного тока серии 2П (2ПО132 — 2ПО200, 2ПФ132 — 2ПФ200)Электродвигатели постоянного тока 2ПН, 2ПБЭлектрические машины постоянного тока серии 4ПДвигатели постоянного тока ДП-112, ДК-112, ДКУ-112Двигатели МР на постоянных магнитах
Двигатели МТА на постоянных магнитахДвигатели PI, PC, 3PI на постоянных магнитахДвигатели MX, МВН, МВО на постоянных магнитахЭлектродвигатели постоянного тока серии ДЭлектродвигатели постоянного тока ДПМЭлектродвигатели постоянного тока ДПУРЭлектродвигатели постоянного тока ПБС, ПБСТЭлектродвигатели постоянного тока ДК-309М