Как известно, при вращении рамки в постоянном магнитном поле, в ней возбуждается переменная ЭДС. Эта переменная ЭДС может быть преобразована в импульсную ЭДС в результате переключения концов рамки с помощью двух коллекторных пластин, представляющих собой два полукольца, в момент, когда ЭДС равна 0. (рис. 6.1)
Даже при наличии двух взаимно перпендикулярных рамок и четырех коллекторных пластин, выходная ЭДС оказывается практически постоянной (рис.6.2).
Таким образом, в машине постоянного тока, используемой как генератор, коллектор выполняет функцию выпрямителя.
Машины постоянного тока обратимы, и их устройства одинаково как для двигателя, так и для генератора.
Машина постоянного тока состоит из двух частей: неподвижной и подвижной, статора и якоря соответственно (рис.6.3).
Статор — неподвижная часть машины, представляет собой цилиндрическую станину, к внутренней поверхности которой крепятся 2, 4 или более полюсов, состоящих из сердечника, полюсных наконечников и обмотки возбуждения.
Подвижная часть, якорь, выполнена в виде цилиндрического пакета, состоящего из большого числа тонких пластин. В продольных пазах якоря размещена обмотка, состоящая из нескольких секций. На валу якоря располагается коллектор, представляющий собой цилиндр из диэлектрика, на котором расположены пластины коллектора, соединенные с секциями обмотки якоря. С внешней электрической схемой коллектор соединяется с помощью графитовых щеток, скользящих по поверхности коллекторных пластин. Щетки установлены так, что переключение секций обмотки якоря (коммутация) происходит в тот момент, когда секция обмотки находится в нейтральной зоне между полюсами.
В этом случае, когда нагрузка генератора отсутствует, ЭДС, возбуждаемая в обмотке якоря, определяется соотношением:
(6.1)
где С
— конструктивный коэффициент,
Ф
— магнитный поток,
n
-число оборотов якоря.
При разомкнутых выходных зажимах генератора ток в цепи якоря равен нулю. При этом магнитное поле якоря отсутствует, и генератор работает в «холостую». Двигатель, приводящий во вращение якорь генератора, преодолевает только момент трения, совершая минимальную механическую работу.
При подключении электрической нагрузки в обмотке якоря и в нагрузке возникает ток, создающий вращающееся магнитное поле якоря, которое, взаимодействуя с неподвижным магнитным полем статора, приводит к появлению тормозного момента. Момент возрастает с ростом тока нагрузки. При этом мощность, выделяемая в нагрузке генератора, увеличивается (напряжение и ток возрастают), что приводит к увеличению механической мощности, развиваемой приводным двигателем.
Суммарное магнитное поле, возникаемое при работе генератора под нагрузкой, оказывается уже не симметричным как в режиме холостого хода, а смещается по направлению вращения генератора или против направления вращения в двигателе. Это обусловлено тем, что появляется магнитное поле якоря, созданное током нагрузки. Подобное явление называют реакцией якоря. Наличие реакции якоря приводит к ухудшению коммутации и к повышенному искрению под щётками. Для устранения этого явления, щётки перемещают из геометрической нейтрали в другое положение, либо машина снабжается дополнительными полюсами и компенсационной обмоткой, включённой последовательно с основной обмоткой якоря. В этом случае компенсация реакции якоря автоматически устанавливается при любых нагрузках машины.
Основным классификационным признаком машин постоянного тока является способ возбуждения главного магнитного поля, создаваемого током, протекающим через обмотку возбуждения. Все рабочие характеристики машин постоянного тока зависят от способа включения обмотки возбуждения по отношению к цепи якоря. Это включение может быть последовательным, параллельным, комбинированным, также эти цепи могут быть независимы друг от друга.
6.1. Генераторы с независимым возбуждением.
В подобных генераторах обмотка возбуждения питается от отдельного источника, вследствие чего ток возбуждения не зависит от напряжения генератора, а следовательно, от условий нагрузки (рис.6.4).
Это дает возможность в очень широких пределах менять магнитный поток, а следовательно, и ЭДС, возникающую на обмотке якоря. Зависимость ЭДС от тока возбуждения при постоянном числе оборотов называется характеристикой холостого хода (рис. 6.5).
Наличие остаточной намагниченности системы возбуждения приводит к тому, что при отсутствии тока возбуждения, ЭДС возбуждения в якоре не равна 0, а равна остаточной ЭДС, Е0. С ростом тока возбуждения магнитное поле возрастает и приводит к магнитному насыщению системы возбуждения, вследствие чего, при значительных токах возбуждения ЭДС не возрастает.
Вид этой характеристики аналогичен подобной характеристике синхронного генератора.
Важной характеристикой генератора является внешняя зависимость напряжения U
на выходе генератора от силы тока якоря (рис.6.6.А). Эта зависимость определяется соотношением:
(6.2)
где Е
— ЭДС якоря,
I
н — ток нагрузки,
R
я — сопротивление обмотки якоря и представляет собой прямую (рис. 6.6.Б пунктир).
Однако, при значительных токах нагрузки появляется насыщение магнитной системы и возникает размагничивающее действие реакции якоря, что приводит к уменьшению суммарного магнитного потока, а следовательно ЭДС и выходного напряжения быстрее, чем по прямой линии.
6.2. Генераторы с параллельным возбуждением.
У таких генераторов цепь обмотки возбуждения соединяется параллельно цепи якоря и часть тока потребляемого двигателем (примерно 1%) используется для питания обмотки возбуждения (рис.6.7).
Обмотка возбуждения выполнена тонким проводом и содержит значительное количество витков. Самовозбуждение подобных генераторов возможно только лишь в том случае, если статор машины сохраняет остаточную намагниченность. Характеристика холостого хода у таких генераторов аналогична характеристике генераторов с независимым возбуждением (рис.6.5), а внешняя характеристика (рис.6.6.Б) проходит ниже, так как при увеличении тока нагрузки увеличивается падение напряжения на обмотке якоря, что приводит к уменьшению выходного напряжения, а следовательно, и тока возбуждения. Генераторы с параллельным возбуждением не боятся коротких замыканий и поэтому наиболее широко распространены.
6.3. Генераторы с последовательным возбуждением.
Якорь у таких генераторах соединен последовательно с обмоткой возбуждения, поэтому ток нагрузки является током возбуждения и током якоря (рис.6.8).Сопротивление обмотки возбуждения должно быть соизмеримо с сопротивлением обмотки якоря, то есть мало (малое число витков толстого провода).
Так как обмотка якоря соединена последовательно с обмоткой возбуждения, характеристика холостого хода у такого генератора отсутствует. Для внешней характеристики генератора характерно наличие максимума, связанное с тем, что при достижении значительных токов нагрузки магнитная система насыщается и магнитный поток уже не растет, а выходное напряжение начинает уменьшаться из-за увеличения падения напряжения на обмотке якоря. Такие генераторы используются очень редко.
Основные параметры электродвигателя постоянного тока
Электродвигатель переходит в режим холостого хода, когда с его вала снимают рабочую нагрузку. В этом случае можно определить такие важные параметры функционирования устройства, как намагничивающий ток, мощность и коэффициент потерь в элементах конструкции привода. Но главное – в режиме холостого хода можно определить исправность устройства.
Так, электродвигатель на холостом ходу греться не должен. Но в некоторых случаях температура привода повышается – и это сигнализирует о неполадках, которые впоследствии могут проявить себя.
6.4. Генераторы смешанного возбуждения.
Такие генераторы имеют две обмотки возбуждения: одну, включенную параллельно обмотке якоря и имеющую значительное сопротивление, и вторую, включенную последовательно, со значительно меньшим сопротивлением (аналогично генераторам последовательного и смешанного соединения) (рис.6.9).
Эти обмотки могут быть включены либо согласно, либо встречно.
В генераторах с согласным включением обмоток выходное напряжение почти не меняется с изменением нагрузки (рис.6.10.А).
Это происходит потому, что магнитный поток последовательной обмотки создается током нагрузки и при увеличении нагрузки возрастает, компенсируя влияние реакции якоря и увеличение падения напряжения внутри генератора.
Генераторы со встречным включением обмоток имеют крутопадающую внешнюю характеристику (рис.6.10.Б). При увеличении тока нагрузки встречный магнитный поток последовательной обмотки размагничивает генератор, и выходное напряжение резко снижается. Наиболее часто подобные генераторы используются в качестве сварочных, т.к. для поддержания горения дуги требуются именно крутопадающие внешние характеристики.
6.5. Двигатели постоянного тока.
Если машину постоянного тока включить в сеть постоянного тока, то в обмотках якоря и в обмотках возбуждения возникают токи. При этом система возбуждения создает постоянное магнитное поле, которое взаимодействует с полем якоря, и на каждый проводник обмотки якоря начинает действовать сила, которая стремится повернуть якорь. Появляется крутящий момент М,
приводящий якорь во вращение.
Помимо вращающего момента М,
возникающего в результате взаимодействия магнитного поля якоря с магнитным полем обмотки возбуждения, на якорь двигателя действует ряд других моментов:
момент холостого хода Мо
, связанный с механическими потерями;
тормозной момент М1
, создаваемый механизмом, приводимым во вращение двигателем;
динамический момент Мдин
сил инерции, возникающий при изменении скорости вращения якоря.
Динамический момент Мдин
пропорционален моменту инерции вращающихся частей
J
и угловому ускорению:
(6.3)
Чем быстрее меняется скорость двигателя, тем больше динамический момент. В установившемся режиме, когда скорость вращения постоянна, динамический момент равен нулю.
Моменты двигателя связаны уравнением, которое носит название уравнения моментов:
(6.4)
В установившемся режиме
вращающий и тормозной моменты взаимно уравновешены, и якорь двигателя вращается с постоянной скоростью.
В зависимости от способа подключения обмотки возбуждения к якорю двигателя, различают двигатели независимого, параллельного, последовательного и смешанного возбуждения.
Механические характеристики двигателей постоянного тока
Аналитическое выражение механической характеристики двигателя постоянного тока можно получить из уравнения равновесия напряжений якорной цепи (при установившемся режиме)
где U
— напряжение на зажимах двигателя, В;
1Я
— ток в цепи якоря, A;
Rя
— сопротивление цепи якоря, Ом; Ф — магнитный поток двигателя, Вб; ω — угловая скорость якоря, рад/с; сд — коэффициент, зависящий от конструктивных данных двигателя. Решив уравнение (3.1) относительно угловой скорости, получим уравнение скоростной характеристики двигателя
Электромагнитный вращающий момент двигателя (Н • м) пропорционален магнитному потоку и току якоря:
Из уравнения (3.3) ток якоря
Подставив в уравнение (3.2) значение тока, выраженное уравнением (3.4), получим уравнение механической характеристики двигателей постоянного тока независимо от способа возбуждения
Рассмотрим механические характеристики двигателей постоянного тока в зависимости от способа возбуждения.
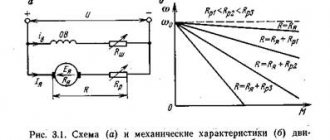
Двигатели постоянного тока параллельного возбуждения. Схема включения двигателя постоянного тока параллельного возбуждения приведена на рис. 3.1, а. Обмотка возбуждения ОВ
может быть подключена к той же сети, что и якорь, или к отдельному источнику тока (независимое возбуждение). В том и другом случае ток возбуждения не зависит от процессов, происходящих в якоре двигателя и при постоянном напряжении сети магнитный поток можно считать постоянным Ф = const. Обозначив сдФ=kд и подставив его в уравнение (3.5), получим уравнение механической характеристики двигателя постоянного тока параллельного возбуждения
При М=0
угловая скорость якоря
называется скоростью идеального холостого хода.
Второй член уравнения (3.6) определяет изменение угловой скорости двигателя при изменении момента
Величина Δω зависит не только от момента, но и от сопротивления цепи якоря. С увеличением Rя величина Δω увеличивается. С учетом уравнений (3.7) и (3.8) уравнение (3.6) можно записать в виде
Из уравнений (3.6) и (3-.9) видно, что механическая характеристика двигателя параллельного возбуждения является прямой линией, тангенс угла наклона которой определяется величиной R
я/kд2
На рис. 3.1,6 приведены естественная и искусственные механические характеристики, полученные введением в цепь якоря реостата. Такие искусственные характеристики используются при пуске и торможении двигателя.
Двигатели постоянного тока последовательного возбуждения. Схема включения двигателя последовательного возбуждения приведена на рис. 3.2, а.
Обмотка возбуждения
ОВ
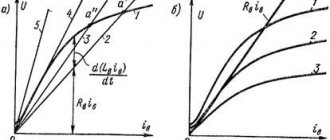
включена последовательно с якорем и по ней протекает ток якоря. Следовательно, магнитный поток двигателя является функцией тока якоря. Эта зависимость выражается графически в виде кривой намагничивания, которая является нелинейной функцией и не имеет аналитического выражения. Поэтому нельзя получить аналитическую зависимость для механической характеристики.
Характерной особенностью двигателей последовательного возбуждения является то, что изменение магнитного потока с изменением тока якоря оказывает большое влияние на скорость двигателя. Это хорошо видно из уравнения скоростной характеристики
которое показывает, что с изменением магнитного потока скорость двигателя может изменяться в широких пределах.
Если для упрощения предположить, что магнитная цепь двигателя не насыщена и поток пропорционален току
Ф = сф/Я,
то момент двигателя
где k = cд / сф.
Подставив в уравнение скоростной характеристики значение Ф = Сф/я, получим
где R
— внутреннее сопротивление цепи якоря, равное сумме сопротивлений обмоток якоря и возбуждения
(Rя + rя).
Заменив в уравнении ток якоря его выражением из (3.10), получим уравнение механической характеристики
Уравнение (3.12) представляет собой уравнение кривой, для которой ось ординат является асимптотой. Подобная характеристика представлена на рис. 3.2,6. Уравнение (3.12) дает лишь общее представление о механической характеристике двигателя. При расчетах им пользоваться нельзя, так как аналитически учесть намагничивание стали невозможно. Как видно на рис. 3.2,6, механическая характеристика двигателя последовательного возбуждения — мягкая. При уменьшении нагрузки угловая скорость резко возрастает, а при М = 0
она стремится к бесконечности. В реальных двигателях ток при холостом ходе не может быть равен нулю вследствие потерь в стали и механических потерь, но угловая скорость может достигнуть опасных по условиям механической прочности значений, равных (5÷6)ωном. Поэтому холостой ход для двигателей последовательного возбуждения недопустим.
Двигатели постоянного тока смешанного возбуждения. Двигатели смешанного возбуждения имеют две обмотки возбуждения (рис. 3.3). Магнитный поток двигателя определяется суммой потоков параллельной ОВпар
и последовательной
ОВпос
обмоток:
Вследствие нелинейной зависимости магнитного потока от тока якоря аналитическое выражение механической характеристики, так же как и для двигателя последовательного возбуждения, получить нельзя.
В зависимости от соотношения магнитных потоков обмоток возбуждения механические характеристики имеют различную жесткость. Чем больше доля магнитного потока последовательной обмотки, тем мягче характеристика. На рис. 3.3 приведены две естественные характеристики с различным соотношением магнитных потоков обмоток возбуждения. Обмотка параллельного возбуждения создает поток Фпар независимый от тока якоря, поэтому двигатель может работать вхолостую со скоростью
Предыдущая2Следующая
Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? — задался я вопросом…
Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право…
Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот…
Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)…
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
6.6. Двигатели с независимым и параллельным подключением.
Схема включения двигателя приведена на рис.6.11. При подключении обмотки возбуждения подобного двигателя к отдельному источнику создается независимое возбуждение.
При включении двигателя постоянного тока в сеть, в момент пуска ток якоря определяется соотношением:
(6.5)
где U
— напряжение сети, Rя — сопротивление обмотки якоря,
Iя
-ток якоря.
Затем якорь под действием крутящего момента приходит во вращение, и в обмотке якоря возбуждается ЭДС самоиндукции
(6.6)
где с — конструктивный коэффициент, n — число оборотов, Ф — магнитный поток системы возбуждения. Полярность ЭДС самоиндукции противоположна полярности напряжения сети (противо- ЭДС), вследствие чего с ростом частоты вращения якоря значительно уменьшается ток, протекающий в цепи якоря.
(6.7)
Следовательно, пусковой ток оказывается значительно больше номинального (в 10…30 раз), и очень часто в цепь якоря включается реостат, величина которого позволяет уменьшить пусковой ток до значений .1…1.5 Iном
. Преобразуя соотношение (6.7) к виду:
(6.8)
получаем, что приложенное напряжение U уравновешивается суммой противо- ЭДС Е
и падением напряжения на обмотке якоря
RяIя
.
Крутящий момент двигателя независимого и параллельного возбуждения определяется соотношением:
(6.9)
С увеличением тормозного момента, создаваемого механической нагрузкой двигателя, механическая мощность возрастает. Число оборотов якоря уменьшается, что приводит к уменьшению противо-ЭДС и росту тока, потребляемого двигателем, а, следовательно, к увеличению крутящего момента и возрастанию электрической мощности, потребляемой двигателем от сети. Зависимость установившейся скорости вращения от тормозного момента двигателя при постоянном напряжении питания цепей якоря и возбуждения называется механической характеристикой двигателя.
Механическая характеристика рассматриваемых двигателей изображена на рис.6.12.
Как видно из графика, скорость вращения двигателей при изменении тормозного момента в широких пределах (от 0 до номинального) изменяется незначительно. Это означает, что двигатели независимого и параллельного возбуждения имеют жёсткую механическую характеристику.
Зависимость скорости вращения n
, тока якоря
Iя
, вращающего момента
М
и коэффициента полезного действия h от полезной мощности
Р
2 на валу двигателя при постоянном напряжении цепей якоря и возбуждения (
I
B=const) называется рабочими характеристиками двигателя.
Рабочие характеристики двигателей параллельного и независимого возбуждения представлены на рис.6.13.
Так как с увеличением полезной мощности вращающий момент возрастает, скорость вращения двигателя уменьшается.
С увеличением вращающего момента увеличивается пропорциональный ему ток якоря. Моменты М
и
М
1 oтличаются на величину момента холостого хода,
М
0. Наибольший к.п.д. достигается при нагрузках, несколько меньших номинальной.
Механическая и рабочая характеристики двигателя независимого возбуждения идентичны аналогичным характеристикам двигателя параллельного возбуждения.
Так как противо- ЭДС зависит от скорости вращения якоря и равна
(6.10)
то приложенное напряжение U
определится соотношением
(6.11)
Отсюда находим выражение скорости вращения двигателя:
(6.12)
Полученная формула позволяет решить задачу регулирования скорости вращения двигателя. Необходимо отметить, что для уменьшения потерь мощности сопротивление обмотки якоря R
я стремятся сделать по возможности малым (в реальных машинах оно составляет сотые или тысячные доли ома), В соответствии с этим и падение напряжения на активном сопротивлении якоря
I
я
R
я невелико по сравнению с напряжением сети. Поэтому в формуле (6.12) членом
I
я
R
я можно пренебречь. Тогда
(6.13)
Отсюда видно, что существует два способа плавного изменения скорости вращения двигателя в широких пределах:
1. изменение напряжения U
, подведенного к якорю двигателя;
2. изменение магнитного потока возбуждения Ф
(тока возбуждения
I
B).
На рис.6.14 показано возможное включение регулировочных реостатов в схему двигателя.
При увеличении сопротивления R
2 , при постоянном напряжении сети
U
, уменьшается напряжение, подведенное к якорю, и следовательно, скорость вращения двигателя. С увеличением сопротивления
R
1 уменьшается ток возбуждения и магнитный поток возбуждения, а, следовательно, увеличивается скорость вращения двигателя.
Второй способ регулирования скорости вращения двигателя предпочтительнее, так как он связан с меньшими потерями мощности: ток возбуждения в десятки раз меньше тока якоря, а потери пропорциональны квадрату тока. Однако при необходимости изменять скорость вращения двигателя в очень широких пределах одновременно используют оба способа.
Возможность плавного и экономичного регулирования скорости вращения в широких пределах является важнейшим достоинством двигателей постоянного тока.
Соотношение (6.13) определяющее скорость вращения двигателя показывает, что по мере уменьшения магнитного потока скорость неограниченно возрастает. С этой точки зрения опасен обрыв цепи возбуждения двигателя, при котором магнитный поток резко уменьшается до величины потока остаточного намагничивания, а двигатель идет «вразнос». Особенно вероятен режим «разноса» у ненагруженного двигателя. Режим «разноса» является аварийным: центробежные силы деформируют обмотку якоря, якорь заклинивается, а в некоторых случаях и разрушается.
У нагруженного двигателя увеличение скорости вращения происходит не столь резко, так как уменьшение магнитного потока при постоянном моменте вращения приводит к такому увеличению тока якоря, при котором произведением I
я
R
я уже нельзя пренебрегать. Но и в этом случае обрыв цепи возбуждения может быть опасным.
Основные характеристики двигателя постоянного тока
Коэффициент полезного действия двигателя
Преобразование электрической энергии в механическую при работе ДПТ сопровождается потерями энергии. Отношение полезной механической мощности Р
2 на валу двигателя к потребляемой из сети электрической мощности
Р
1 определяет коэффициент полезного действия (КПД) двигателей
Полезная механическая мощность Р
2 , снимаемая с вала двигателя, рассчитывается по формуле
где М
= МС – момент сопротивления на валу двигателя, Нм;
n
– частота вращения вала двигателя, об/мин.
Так как двигатель обладает «саморегулированием», то вращающий момент, развиваемый двигателем, равен моменту сопротивления на его валу, т.е. МВР = МС = М, поэтому, зная полезную мощность двигателя, можно определить его вращающий момент по выражению
Потребляемая двигателем мощность Р
1 определяется по формуле
где U – напряжение питания двигателя.
I
=
I
я +
I
в — ток, потребляемый из сети двигателем с параллельным возбуждением.
ΔР = ΔР
э +Δ
Р
ст + Δ
Р
мех — сумма всех потерь двигателя постоянного тока, Вт.
где ΔРэ – электрические потери;
ΔР
ст – потери в стали статора и якоря;
ΔР
мех – механические потери.
Электрические потери ΔРэ являются переменными, так как зависят от нагрузки и их значения может быть представлено как
где ΔР
я = Iя 2 Rя – потери в обмотке якоря (при номинальном режиме составляют 50% всех потерь);
ΔР
в = Iв 2 Rв – потери в обмотке возбуждения;
ΔР
щ = Iя 2 ΔUщ – потери на коллекторно-щеточном контакте;
ΔUщ – падение напряжения между щеткой и коллектором (зависит от материала щеток: ΔUщ = 2 В для графитовых и 0,6 В для металлографитовых щеток.)
Потери в стали ΔР
ст связаны с вихревыми токами и перемагничивании якоря при его вращении и составляет 1 – 3% от номинальной мощности двигателя.
Механические потери ΔР
мех связаны с трением движущихся частей двигателя и составляют 1 -2 % от номинальной мощности двигателя. Эти потери, как и потери в стали, являются постоянными и не зависят от нагрузки двигателя. Их называют потерями холостого хода.
При работе ДПТ вхолостую Р2 = 0 и η
= 0 при увеличении полезной мощности Р2 КПД растет. Двигатели рассчитывают так, чтобы максимальное значение КПД соответствовало номинальной мощности двигателя (при этом постоянные потери равны переменным). При нагрузке больше номинальной КПД уменьшается за счет значительного роста переменных потерь. Для машин мощностью 1 – 100 кВт номинальное значение КПД лежит в пределах 74 – 92 %.
Основными характеристика ДПТ, получаемыми теоретически или экспериментально, являются его механическая характеристика, а также рабочая и регулировочная характеристики.
Механической характеристикой двигателя называется зависимость частоты вращения якоря nот момента М на валу двигателя: n = f(М). Уравнением механической характеристики является выражение (6.7).
Механическая характеристика двигателя с параллельным возбуждением представляет собой прямую с незначительным наклоном по мере роста момента на валу (рис.6.7). Такая характеристика называется «жесткой».
Рис. 6.7. Механическая характеристика ДПТ с параллельным возбуждением.
Жесткость механической характеристики объясняется тем, что при параллельном включении обмотки возбуждения, с ростом момента нагрузки, ток возбуждения Iв, а следовательно, и магнитный поток двигателя Ф остаются неизменными, а сопротивление якоря Rя сравнительно мало.
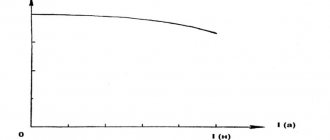
Рабочие характеристики ДПТ представляют собой зависимости частоты вращения n, момента М, тока якоря Iя и КПД η
от полезной мощности Р2 на валу двигателя при неизменном напряжении на его зажимах U = const.Рабочие характеристики ДПТ с параллельным возбуждением представлены на рис. 6.8.
Зависимость полезного момента на валу двигателя от нагрузки Р2 представляет собой почти прямую линию, так как момент этого двигателя пропорционален нагрузке на валу: М = 9,55 Р2/n. Искривление указанной зависимости объясняется некоторым снижением частоты вращения с увеличением нагрузки. При Р2 = 0 ток, потребляемый электродвигателем равен току холостого хода. При увеличении мощности, развиваемой электродвигателем, ток якоря увеличивается приблизительно по той же зависимости, что и момент нагрузки на валу, так как при условии Ф = const токе якоря пропорционален моменту нагрузки.
Рис. 6.8. Рабочие характеристики ДПТ с параллельным возбуждением.
В соответствии с тремя вышеуказанными способами регулирования частоты вращения двигателя, его регулировочными характеристиками являются зависимости: n = f(Rя), n = f(Iв), и n = f(U),
где Rя – сопротивление якорной цепи, равное сумме сопротивлений самого якоря и реостата регулирования тока возбуждения;
Iв – ток возбуждения, вызывающий пропорциональный ему магнитный поток возбуждения Ф;
U – напряжение, подаваемое на обмотку якоря, при соблюдении условия Ф = const, т.е. Iв = const.
Примерный вид регулировочных характеристик, получаемых из выражения (6.7) при условии М = const, представлен на рис. 6.9.
Рис. 6.9. Регулировочные характеристики ДПТ с параллельным возбуждением: а) n = f(Rя), б) n = f(Iв) с) n = f(U).
1.1. Простейшая цепь постоянного тока…………….………………………..1
1.2. Баланс мощностей в простейшей цепи постоянного тока………………..7
1.3. Последовательное соединение сопротивлений……………………………9
1.4. Параллельное соединения сопротивлений……………………………….10
1.5. Смешанное соединение сопротивлений……………………………….….12
1.6. Холостой ход и короткое замыкание …………………………………. 13
1.7. Расчет сложных электрических цепей постоянного тока………………14
1.7.1. Метод непосредственного применения законов Кирхгофа………….14
2. ОДНОФАЗНЫЙ ПЕРЕМЕННЫЙ ТОК……………………………………18
2.1. Получение однофазного переменного тока……………………………..18
2.2. Цепь переменного тока с активным сопротивлением…………………..20
2.3 Цепь переменного тока с индуктивным сопротивлением……………….23
2.4. Цепь переменного тока с ёмкостным сопротивлением…………………25
2.5. Цепь переменного тока с последовательным
соединением активного, индуктивного и ёмкостного сопротивлений
2.7. Цепь переменного тока с параллельным соединением
активного, индуктивного и ёмкостного сопротивлений