Отличие и разновидности шаговых двигателей
По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов. У них по сравнению с двигателем постоянного тока нет щёток, коллектора, а обмотки с меньшим количеством витков.
Среди первых двигателей был создан миниатюрный двигатель для ручных часов и назван в честь французского инженера Мариус Лавета. Статор расцеплен на краях или в районе ротора имеет небольшие сужения. Ротор диаметром 1.5 мм, магнитный на основе кобальта. Одна обмотка в один ряд питание 1.5 вольта. Угол поворота 90 градусов.
Моторчик лавета применяется также и в медицине для перекачки различной жидкости, а также часто используется в миксерах и блендерах.
В последнее время ведутся разработки пьезоэлектрических двигателей с использованием пьезомагнитного эффекта и применяя в конструкции ферромагнитные материалы. Совершенствуются линейные электродвигатели, у которых вал не вращается, а совершает линейные движения. Для оборудования точной механики российские производители выпускают двигатели с маркировкой серии:
ДШ.- ДШР.
- ДШГ.
- ДШЛ.
- ШД.
- ДШЭ
В производстве их участвуют такие предприятия, как НПО «АТОМ», ZETEK, компания Электропривод, Stepmotor, Вексон, НПО РИФ, Саратовский эл. механический, корпорация ВНИИЭМ, ЗАО Уралэлектромаш, АРК «Энергосервис». Производством ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD занимаются зарубежные фирмы: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и другие. Ассортимент выпускаемых ШД разнообразный: по типоразмерам, мощности, со встроенным редуктором и платой управления.
Подключение шагового двигателя к микроконтроллеру AVR ATmega16
Шаговые двигатели – это бесщеточные двигатели постоянного тока, которую могут вращаться от 00 до 3600 дискретными шагами. С каждым управляющим сигналом ось такого двигателя поворачивается на фиксированное значение (шаг). Управление вращением подобных двигателей осуществляется последовательностью специальных сигналов. В отличие от серводвигателей шаговые двигатели могут управляться контактами ввода-вывода общего назначения, а не только контактами ШИМ модуляции, и могут вращаться на (+3600) и (-3600). Последовательность следования управляющих сигналов определяет будет ли шаговый двигатель вращаться по часовой или против часовой стрелки. Для управления скоростью вращения такого двигателя необходимо просто изменять уровень управляющих сигналов. У шаговых двигателей есть несколько режимов шагового (дискретного) вращения – на полный шаг, на половину шага и на микрошаг.
В этом проекте мы будем подключать шаговый двигатель 28BYJ-48 к микроконтроллеру ATmega16 (семейство AVR), используя программу Atmel Studio 7.0. Шаговый двигатель будет работать при напряжении питания 5В. Мы будем подключать шаговый двигатель к микроконтроллеру с помощью драйверов электродвигателей ULN2003 и L293 (по отдельности). Оба будут запитываться напряжением 5В.
Конструкция и принцип работы
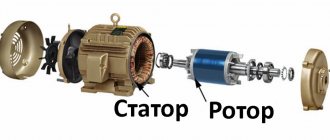
Шаговый двигатель состоит из статора и вращающегося ротора. Сердечник статора выполнен в виде набора листов электротехнической стали (штампованных). Это уменьшает вихревые токи и соответственно нагрев. Статор по окружности разбит на 4.6.8 продольных пазов. Применяется и больше. На выступах между пазами располагаются обмотки в виде катушек. Количество пазов соответствует количеству полюсов двигателя. Чем больше полюсов, тем меньше угол поворота ротора, то есть шаг.
Ротор состоит из одного или двух постоянных магнитов, с торцов, металлические пластины которого закреплены с зубьями. При этом плюса S и N постоянного магнита разбиваются на n полюсов, что соответствует количеству зубьев. Это также влияет на величину шага вращения. По конструкции ШД выпускаются трёх типов в зависимости от конструкции ротора:
- реактивный;
- ротор из постоянного магнита;
- гибридный.
Реактивный — ротор выполнен из ферромагнитного материала с продольными пазами, полюсами. Он используется редко, только для выполнения простых задач. В основном из-за того, что у него нет стопорящего момента. Гибридный — ротор изготовлен из двух половинок ферромагнитного материала, с продольными пазами и между ними расположен постоянный магнит. Пазы половинок относительно друг друга, сдвинуты на небольшой угол, для понижения шага. Они чаще всего применяются.
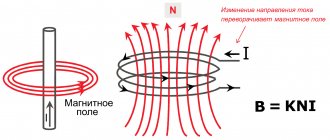
При подаче импульсного напряжения на обмотку статора образуется электромагнитное поле. Взаимодействуя, с ближайшим полюсом постоянного магнита создаётся крутящий момент. Вал двигателя поворачивается на определённый угол. Угол поворота в основном зависит от количества полюсов ротора.
Такой двигатель и будет называться шаговым. Благодаря небольшим размерам ШД серии Em 422 применяется в матричных принтерах.
Принцип работы биполярного шагового электродвигателя
На следующем рисунке показана схема работы биполярного шагового электродвигателя. О другом типе шаговых электродвигателей — униполярных – можно прочитать в соответствующих источниках. В биполярном шаговом двигателе, как правило, имеются четыре катушки. Катушки, расположенные одна против другой, соединены так, что работают синхронно. Все катушки расположены на неподвижном статоре двигателя, а значит, нет необходимости во вращающемся коллекторе и щетках, как у двигателей постоянного тока.
Ротор шагового электродвигателя выполнен в форме намагниченных зубцов с чередующимися северным (С) и южным (Ю) полюсами (зубцов на роторе обычно гораздо больше, чем показано на представленном рисунке). Каждую катушку можно подключить так, что она будет намагничена или как северный полюс, или как южный, — в зависимости от направления тока в катушке. Катушки 1 и 3 работают совместно так, что когда катушка 1 будет южным полюсом, катушка 3 также будет южным полюсом. То же самое относится и к катушкам 2 и 4.
Начнем с варианта рисунка под буквой «а» — когда катушка 1 , а значит, и катушка 3 запитаны так, что становятся южными полюсами (Ю), вследствие того, что разноименные полюса притягиваются, а одноименные отталкиваются, ротор поворачивается против часовой стрелки до тех пор, пока ближайшие зубцы ротора с намагниченностью северного полюса (С) не поравняются с катушками 1 и 3 (как показано на «б»). Чтобы продолжить вращение против часовой стрелки, на следующем шаге (рисунок «в») необходимо подать ток в катушки 2 и 4 так, чтобы они стали северными полюсами (С). Тогда ближайшие зубцы ротора с намагниченностью Ю подтянутся к катушкам 2 и 4 (рисунок «г»).
Каждое такое действие проворачивает ротор электродвигателя на один шаг. Для продолжения вращения против часовой стрелки в катушке 1 снова нужно создать намагниченность С (см. представленную таблицу).
Таблица 1. Последовательность действий при вращении шагового двигателя против часовой стрелки
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | — |
| — | С |
| С | — |
| — | Ю |
Прочерки в графах таблицы 1 указывают на то, что катушка в этот момент не оказывает влияния на вращение ротора и должна быть обесточена. Чтобы усилить момент вращения двигателя, на эти обесточенные катушки можно подать такой ток, чтобы полярность их намагниченности совпадала с полярностью стоящего под ней зубца ротора (таблица 2).
Таблица 2. Уточненная последовательность переключения катушек при вращении шагового двигателя
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | С |
| С | С |
| С | Ю |
| Ю | Ю |
Для изменения направления вращения ротора нужно всего лишь изменить порядок переключения катушек, указанный в таблице 2, на обратный.
Методы управления фазами
Управление в основном зависит от количества полюсов и конфигурации обмоток статора. ШД выпускаются в основном со следующими обмотками:
- Две обмотки с 4 выводами.
- Две обмотки с 6 проводами со средним выводом.
- Четыре обмотки — 8 выводов.
Управлять можно двумя методами, использовать однополярное напряжение — униполярное или двухполярное — биполярное. Униполярный шаговый двигатель имеет 4 полюса и 2 обмотки. У четырехфазного каждая обмотка разделена пополам и располагается на противоположных полюсах. Вращение осуществляется поочерёдной подачей напряжения на обмотки. При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины. Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
Двигатели с биполярным управлением имеют 4 обмотки, по 2 на каждую фазу. Управление происходит при смене полярности обмотки. При таком управлении усложняется схема подключения шагового двигателя, но крутящий момент при этом получается больше. Основные характеристики — напряжение питания, потребляемый ток фазы, шаг, мощность и размер фланца. Посадочные места стандартизированы и указываются как, например, Nema 23. Это соответствует расстоянию между отверстиями под крепление 57 мм.
Подключаем шаговый двигатель
Сегодня мы попробуем к микроконтроллеру Atmega8a подключить шаговый двигатель.
Шаговые двигатели – это такие двигатели, которые посредством подачи напряжения на определённую обмотку переводят свой ротор в определённое место, тем самым достигается более точное управление угловой скоростью. Можно также, в принципе, управлять и положением ротора, но это уже как-то больше сервоприводы, с которыми, мы, возможно, тоже, когда-то столкнёмся.
Шаговые двигатели в наше время приобретают всё больший интерес, так как в наш век точной электроники люди что-то мастерят движущееся, наподобие роботов и каких-то умных машин, также доходит дело до определённых летательных аппаратов и прочих устройств.
Поэтому я также не обошел этот вопрос стороной и решил также что-то об этом рассказать и подключить шаговый двигатель к контроллеру и попробовать им поуправлять. Как только мне это удалось, я решил этим поделиться и с вами.
Мне в руки попался именно вот такой вот шаговый двигатель 28-BJ48 компании Kiatronics
Питается данный двигатель от 5 вольт, питание подается попеременно на различные обмотки, которых 4, и если питание снимается с одной обмотки и подается на другую, то ротор. соответственно. устраемляется к ней.
Данные обмотки своими сердечниками в статоре находятся не в 4 местах, а намного чаще, а именно каждая повторяется 2048 раз, поэтому когда мы подаем напряжение на соседнюю обмотку, ротор поворачивается на очень малый угол. А если напряжение подавать ещё и на 2 соседние обмотки, то ротор можно расположить между ними, и количество положений при этом вообще удваивается. А есть вообще микрошаговый режим, когда мы на одну обмотку подаём меньшее напряжение, а на другую большее, то и вообще можно потеряться в количестве шагов и вообще крутить данный шаговый двигатель очень плавно.
Питать двигатель лучше не от ножек контроллера, а лучше через какую-нибудь развязку. Можно использовать мощные транзисторы, но существует специальная микросхема-драйвер для шаговых двигателей. Как правило, выпускается данный драйвер в виде готовых модулей, выглядящих приблизительно вот так вместе с подключенным шаговым двигателем
Данный модуль представляем собой микросхему ULN2003. Можно использовать ее не только для двигателей. Но мы будем использовать здесь 4 входа и 4 выхода, так как у нашего двигателя 4 провода. каждый из которых подключен к определённой обмотке, а пятый провод является общим. Подключенный таким образом мотор уже не влияет на ножки портов, у которых ограничен максимальный ток и можно уже ничего не бояться на этот счёт. При подключении к ножкам контроллера мы используем входы модуля IN1, IN2, IN3 и IN4, а разъём двигателя просто соединим с разъёмом модуля.
Нарисуем вот такую схему, чтобы лучше понять принцип работы двигателя (чтобы увидеть процесс рисования, смотрите видеоверсию урока, ссылка на которую внизу страницы)
Здесь мы видим 4 катушки, одним выводом которые соединены к общему проводу, а на другие выводы каждой катушки мы будем подавать логические уровни, например на рисунке поданы 1000.
Данные обмотки потом по кругу так циклически и повторяются.
Теперь рассмотрим возможные режимы управления с помощью логических уровней.
1 режим – этот простейший режим, при котором мы по очереди подаём логические единицы или высокие логические уровни на каждую обмотку. Называется он также полношаговый режим или One Phase Step Mode.
Схематично данный режим можно изобразить таким образом
Существует также ещё один интересный режим – это режим когда ротор будет шагать между обмотками, то есть мы единички будем подавать на 2 соседние обмотки
А также есть ещё и третий решим – это полушаговый режим, когда мы уже чередуем комбинации, сначала ротор будет находиться у обмотки, потом наполовину переместится к соседней обмотке, потом совсем к соседней обмотке и т.д. Это полушаговый режим или one and two-phase-on
Вот таких вот три режима существуют. мы остановимся на 3 режиме, так как он будет самый плавный и самый интересный.
На следующем занятии мы соберём всю нашу схему с шаговым двигателем и начнём уже писать какой-то исходный код.
Программатор и шаговый двигатель 28YBJ-48 с драйвером ULN2003 можно приобрести здесь:
Смотреть ВИДЕОУРОК (нажмите на картинку)
Источник
Способы управления шаговым двигателем
Применение ШД в станках с ЧПУ конкурирует только с сервоприводами, например, в эрозионных станках или принтерах, они даже превосходят их по своим техническим возможностям, себестоимости и простым схемам управления. Управление можно осуществлять на цифровых микросхемах, специализированных — А3977, на программированной PIC16, через ключи или драйверы SMSD 1.5.
Большинство драйверов управляются компьютером через порты RS-232, USB и LPT. Они вырабатывают сигналы управления: шаг, направление, разрешение и обеспечивают дробление шага на ½ до 1/32 и работают с программами: MACH3, KCam, DeskCNC, Turbocnc и другими. Кабелем подключить двигатель к драйверу согласно описанию. Изучив работу программы, запустить в работу несложно. Для включения используется напряжение от 5 вольт до 48 вольт. Исключения составляют двигатели на 220/110 вольт.