Общие сведения об МПТ
Сегмент МПТ или электромеханических преобразователей можно условно разделить на однофазные и трехфазные системы. Также на базовом уровне выделяют асинхронные, синхронные и коллекторные устройства, при этом общий принцип действия и конструкционное исполнение у них имеет много схожего. Данная классификация машин переменного тока носит условный характер, поскольку современные станции электромеханического преобразования частично задействуют рабочие процессы от каждой группы устройств.
Как правило, в основе МПТ находится статор и ротор, между которыми предусматривается воздушный зазор. Опять же, независимо от типа машины, рабочий цикл строится на вращении магнитного поля. Но если в синхронной установке движение ротора соответствует направлению силового поля, то в асинхронной машине ротор может двигаться в другом направлении и с разными частотами. Это различие обуславливает и особенности применения машин. Так, если синхронные могут выступать и в качестве генератора, и как электромеханический двигатель, то асинхронные в основном используют как двигатели.
Что касается количества фаз, то выделяют одно- и многофазные системы. Причем, с точки зрения практического использования, заслуживают внимание представители второй категории. Это по большей части трехфазные машины переменного тока, в которых функцию энергоносителя как раз выполняет магнитное поле. Однофазные же устройства ввиду эксплуатационной непрактичности и крупных размеров постепенно выходят из практики применения, хотя в некоторых сферах решающим фактором их выбора является низкая стоимость.
МАШИНЫ ПЕРЕМЕННОГО ТОКА
6.1 Общее устройство машин переменного тока
Машинами переменного тока (МПрТ) называются устройства, преобразующие электрическую энергию переменного тока в механическую и наоборот. Как и машины постоянного тока (МПТ), они обладают принципом обратимости и также имеют подвижную и неподвижную части. Подвижная часть называется р о т о р о м, а неподвижная с т а т о р о м.
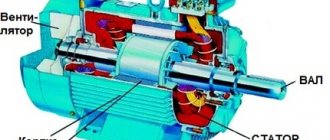
В отличие от МПТ, в машинах переменного тока наиболее важным узлом является неподвижная часть, т.е. статор (рис.52). Это объясняется тем, что именно в обмотке статора наводится ЭДС. В генераторе она создает напряжение на клеммах машины, а в двигателе определяет величину поступающего тока и и его механические характеристики.
Так же как в якоре МПТ, она размещается в пазах статора. Статор состоит из корпуса (1), сердечника (2) и обмотки (3). Обмотка машин переменного тока является 3-х фазной и это обстоятельство является главной особенностью машин переменного тока. Дело в том, что за счет сдвига фаз токов друг относительно друга на 1200, и пространственного разнесения катушек в полости статора также на 1200, удается создать вращающееся магнитное поле. Этот факт иллюстрируется на рис.53.
На нем представлены колебания 3-х токов в катушках А, В, С , пространственное положение которых в статоре отмечено тремя метками на нижних круговых диаграммах. Указанные катушки изображены на окружностях в порядке следования по часовой стрелке вдоль каждой из семи окружностей, символизирующих внутреннюю полость статора. Черная стрелка в каждой окружности изображает суммарное магнитное поле созданное этими катушками. Так, при 00, суммарное магнитное поле направлено вверх , к катушке А (ток в ней положителен). При 600, т.е. спустя некоторое время, наибольший ток — отрицательного знака — возникает в катушке В и суммарное магнитное поле становится направленным от катушки В, которая находится в правой нижней части окружности статора). При 1200, наибольшее значение — положительное — приобретает ток в катушке С и суммарное магнитное поле оказывается направленным к катушке С, находящейся в нижней левой части окружности-статора и т.д. Важным моментом в рассматриваемом изменении ориентации магнитного поля является то, что оно остается п о с т о я н н ы м п о м о д у л ю . То есть колебания 3-х токов в обмотках статора приводят к равномерному вращению постоянного по величине магнитного поля в полости статора.
Получающееся магнитное поле (N-S) совершает один полный оборот за один период колебаний. Как известно, промышленный 3-х фазный ток имеет частоту 50 Гц, — следовательно скорость вращения магнитного поля в полости статора МПрТ составляет 50х60 = 3000 об/мин. В силу обратимости машин переменного тока справеливо и обратное утверждение: для создания трехфазного тока с частотой переменного тока 50 Гц, в машине с 3-мя катушками, скорость вращения магнитного поля (N-S) – т.е. ротора c одной парой полюсов — должна составлять 3000 об/мин. Это значение скорости является максимальным для серийных машин переменного тока, однако не единственно возможным.
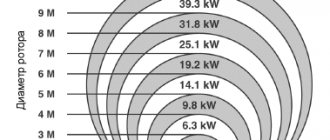
Действительно, если вместо 3-х катушек в полости статора разместить 6 катушек в порядке чередования «А-В-С-А-В-С», то за один период колебания тока в каждой фазе вектор индукции суммарного магнитного поля повернется только на 1800, а скорость вращения поля снизится до 1500 об/мин. При этом ротор такой машины должен иметь 2 пары полюсов «N-S-N-S», так как по истечению полного периода колебаний тока, и повороте ротора на 1800, ориентация полюсов должна приобрести первоначальную конфигурацию. Это возможно только, если одноименные полюса ротора также находятся под углом 1800, а разноименные — под углом 900.
В результате при 3-х кратном увеличении числа катушек, можно получить все меньшие скорости вращения:
| Число катушек |
| Скор. вращ.(об/мин) |
| Чсло полюсов |
Такую зависимость используют для создания двигателей и генераторов с пониженными скоростями вращения. В частности, на больших электростанциях (АЭС, ГЭС) используются очень мощные и массивные машины переменного тока. Так, масса ротора генератора Саяно-Шушенской ГЭС достигает 900 тонн, а диаметр –свыше 10 метров (10,3 м). Такой ротор ни при каких условиях не может вращаться со скоростью 3000 об/мин. — его внешние края должны были бы иметь скорость в несколько раз большую скорости сверхзвукового истребителя. Чтобы сделать скорость вращения ротора приемлемой для такого массивного устройства — например 50 об/мин для выработки тока частотой 50 Гц — на статоре генератора необходимо разместить n = 3*(3000/50) = 180 катушек, а ротор должен иметь р = 180/3 = 60 пар полюсов. Так, ротор генератора Саяно-Шушенской ГЭС имеет 42 полюса и скорость вращения 3000/21= 142,8 об/мин.
Несмотря на большое количество катушек, у статора любой МПрТ всего 6 выводных клемм. Это значит, что все катушки объединяются в 3 однофазных группы, а в каждой группе (фазе) они соединяются либо параллельно либо последовательно. Стороны катушек укладываются в пазы, а расстояния между сторонами выбирается таким образом, чтобы они оказались под соседними противоположными полюсами ротора. Это приводит к тому что ЭДС, наводимые на противоположных сторонах каждой катушки складываются друг с другом. Реальная технология создания обмоток статоров машин переменного тока достаточно сложна и разнообразна. Поэтому в рамках отведенного программой количества учебных часов, мы больше не будем на этом останавливаться.
Что касается роторов МПрТ, то их конструкция задается типом машины переменного тока, который, в свою очередь, определяется характером поведения ротора по отношению к вращающемуся магнитному полю статора. А именно, существует два типа машин: а) с и н х р о н н ы е машины; б) а с и н х р о н н ые машины.
В синхронных машинах ротор имеет такую же скорость вращения, как и магнитное поле (отсюда и их название). В асинхронных машинах скорость вращения ротора не совпадает со скоростью вращения магнитного поля. Если она меньше скорости вращения поля, то машина работает как двигатель, если выше — как генератор.
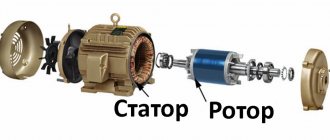
Синхронные машины используются на практике и как генераторы и как двигатели. В частности, все промышленные генераторы электроэнергии на ГЭС, АЭС, ТЭЦ являются синхронными. Асинхронные машины , в основном, используются как двигатели и получили чрезвычайно широкое распространение благодаря простоте своей конструкции. Именно в силу последнего обстоятельства асинхронные двигатели будут рассмотрены более подробно. На нижних рисунках представлены роторы синхронных генераторов ( рис.54) и асинхронных двигателей (рис.56).
6.2 Асинхронные двигатели
Асинхронные двигатели (АД, рис.55) получили широкое распространение в различных отраслях промышленности и бытовых приборах благодаря простоте конструкции. Они широко применяются в приводах металлообрабатывающих, деревообрабатывающих станков, кузнечно-прессовых, ткацких, швейных, грузоподъемных, землеройных машин, вентиляторов, насосов, компрессоров, центрифуг, в ручном электроинструменте.
Асинхронные двигатели выпускаются в двух исполнениях: а) с короткозамкнутым ротором (КР); б) с фазным ротором (ФР). Именно первый тип двигателей получил наибольшее распространение. Двигатели с фазным ротором используются реже вследствие относительной сложности и дороговизны конструкции. Однако они обладают лучшими пусковыми и регулировочными характеристиками и их применяют для привода конвейеров, подъемников, крановых конструкций, различных промышленных мельниц (угольных, цементных и т. д.), вентиляционных систем, а также технических средств, рассчитанным на длительное время непрерывной работы. Ниже рассматривается принцип работы АД с короткозамкнутым ротором, который, в целом сохраняется и в машинах с фазным ротором.
Корпус АД с КР отливают из алюминиевого сплава или из чугуна, либо делают сварным. Обычно поверхность корпуса имеет ряд продольных ребер ( рис.55) увеличивающих охлаждение двигателя. В отличие от синхронных машин, роторы которых имеют собственные магнитные полюса (рис.54), роторы асинхронных двигателей их не имеют (рис.56). Это объясняется тем, что магнитное поле роторов асинхронных двигателей является не собственным, а н а в е д е н н ы м. Основным узлом КР является система из медных или алюминиевых стержней , стянутых между собой торцевыми кольцами и образующих конструкцию типа «беличье колесо» (рис.56, «в»). Эта конструкция образует о б м о т к у р о т о р а, которая имеет тот же смысл, что и вторичная обмотка трансформатора. Обмотка заключается в ферромагнитный сердечник — тело ротора (рис.56, «а», «б»). Сердечник набирается из пластин электротехнической стали и выполняет функцию участка магнитопровода — остальной магнитопровод включает в себя и сердечник статора. В результате вся машина состоит из магнитопровода и двух его обмоток — обмотки статора и обмотки ротора. Это означает, что двигатель, с достаточной степенью корректности можно рассматривать как разновидность трансформатора.
Последнее обстоятельство проявляется в использовании конструкции асинхронного двигателя (в варианте с фазным ротором) в качестве трансформатора, который называется и н д у к ц и о н н ы м р е г у л я т о р о м напряжения. Такой трансформатор обеспечивает плавное изменение напряжения в обмотке ротора при плавном его повороте относительно неподвижной обмотки статора на заданный угол — при этом сам ротор не вращается.
Асинхронный двигатель с КР работает следующим образом:
1) при подаче 3-х фазного напряжения в обмотку статора, в его катушках появляется ток, который порождает вращающееся магнитное поле (см.выше);
2) магнитное поле, пересекая «беличье колесо» обмотки ротора, наводит в ней по закону электромагнитной индукции вихревую электрическую ЭДС, которая, в свою очередь, наводит в его стержнях ток и магнитное поле.
3) магнитное поле ротора взаимодействуя с бегущим магнитным полем статора, создает на роторе вращающий момент и увлекает его за вращающимся полем статора.
При любом положении и скорости ротора, его магнитное поле всегда «бежит» за магнитным полем статора с такой же скоростью. Это означает, что полюса ротора никаким образом не привязаны к самому ротору и непрерывно меняют по отношению к нему свою ориентацию. Поэтому для выражения степени отличия скорости вращения ротора , n, от скорости вращения магнитного поля статора, n0, вводится понятие коэффициента скольжения,s:
Если ротор неподвижен, то n=0 и s=1; если ротор достиг скорости вращения магнитного поля, то n= n0 и s=0. Следовательно для всех возможных скоростей вращения ротора справедливо неравенство: 0 < s ≤ 1. Левая часть этого неравенства является с т р о г о й ( 0< s) — это значит, что ротор двигателя н и п р и к а к и х условиях не может вращаться точно со скоростью магнитного поля. Связано это с электромагнитной индукцией, которая возникает только при переменном магнитном поле. Если ротор догоняет магнитное поле обмотки статора, то для него оно перестает изменяться — поле статора «зависает» над ротором и индуцирование ЭДС прекращается. Соответственно в роторе пропадает ток, магнитное поле и взаимодействие полей — ротор теряет связь с вращающимся магнитным полем статора. Под действием сил трения ротор неизбежно начнет отставать от вращающегося магнитного поля. Вот почему такой двигатель называют «асинхронным», т.е. несинхронным.
Дальнейшее рассмотрение двигателя связано с выяснением внутренних процессов, протекающих в нем при разных скоростях вращения. Эти процессы оказывают сильное влияние на рабочие свойства и характеристики АД. В частности, в скоростном режиме асинхронного двигателя можно выделить режим пуска, режим холостого хода и рабочий режим.
А. Режим пуска
В этом режиме принципиальным моментом является неподвижность ротора (s=1) — магнитное поле статора имеет относительно него очень высокую скорость вращения и создает большую ЭДС. Эта ЭДС создает, в свою очередь, в роторе большой ток, чье магнитное поле, пересекая с такой же скоростью собственные неподвижные стержни, создает большую ЭДС самоиндукции. Все это приводит к сдвигу фаз между ЭДС в роторе и его током близкому к 900. Другими словами, ротор в момент пуска имеет большое индуктивное сопротивление.
На рис. 57 представлена упрощенная фазовая диаграмма электрических параметров АД в момент пуска. Основным параметром диаграм-мы является магнитный поток статора Фс, отложенный в горизонтальном положении. По часовой стрелке относительно него (вертикально вверх) отложен вектор сетевого напряжения, который должен опережать ток статора и созданный им магнитный поток Фс, на 900, поскольку обмотка статора является индуктивным элементом цепи. Против часовой стрелки (вертикально вниз) отложен вектор ЭДС обмотки ротора, которая всегда отстает от создающего его магнитного потока на 900 ( ЭДС обмотки статора, ради упрощения, не приведена). Так как ток обмотки ротора, в свою очередь, отстает от своей ЭДС еще на угол, близкий к 900 , то общая ориентация магнитных потоков на диаграмме ФР и Фс в фазовом выражении оказывается близкой к 1800. На диаграмме их вектора оказываются ориентироваанными в противоположном направлении.
С другой стороны, фазовые сдвиги векторов на векторных диаграммах должны повторять фазовые сдвиги между параметрами и в реальном пространстве, если последние определены в нем материально. Магнитные потоки, в отличие от токов и напряжений, осуществляют в нем реальное вращения и регистрирующие приборы должны фиксировать между ними те же фазовые сдвиги, что и на векторных диаграммах. Это, в частности, означает, что магнитные потоки в момент пуска вращаются в полости статора под углами близкими к 1800 — с такой ориентацией полюсов, как показано на рис.57. ( круг со сплошной линией обозначает ротор, а с пунктирной — статор). В частности, из этого следует что в момент пуска, магнитные полюса ротора оказываются под магнитными полюсами статора. Это означает, что силовое взаимодействие между ними имеет в основном радиальный характер. Реальное же вращение создают только касательные взаимодействия, которые , как следует из рисунка, могут быть недостаточно сильными (если полюса находятся точно друг под другом, то касательные взаимодействия вообще пропадают). Это приводит к выводу, подтверждающемуся опытом: асинхронные двигатели с короткозамкнутым ротором обладают слабым пусковым моментом.
Это серьезный недостаток АД, который привел на практике к их вытеснению из ряда практических приложений и замене двигателями постоянного тока, чьи пусковые характеристики существенно лучше. Другим следствием этого недостатка явилось появление асинхронных двигателей с фазным ротором, в которых указанный недостаток преодолевается переходом от короткозамкнутой обмотки к разомкнутой — фазной. Фазная обмотка конструктивно повторяет обмотку статора и в момент пуска замыкается на внешние сопротивления. Появление в обмотке ротора дополнительных сопротивлений меняет взаимную ориентацию магнитных полей (см.далее) статора и ротора в момент пуска — а именно: благодаря сопротивлениям, магнитные полюса ротора выводятся из под магнитных полюсов статора и касательная составляющая их взаимодействия резко увеличивается. Недостатком АД с фазным роторм является их удорожание и усложнение обслуживания; в частности, реостаты после пуска должны выводится из цепи ротора , а обмотка шунтироваться накоротко.
Режим пуска АД с короткозамкнутым ротором имеет и другой существенный недостаток — большие значения тока в момент включения двигателя в обмотке статора. Эти значения могут превышать номинальные, т.е. рабочие, в 5 – 15 раз. В сочетании со слабым пусковым моментом это может привести к выходу из строя двигателя в момент пуска.
Причина этого заключается в уже установленной противофазности магнитного поля ротора и статора. Так как пространственно при пуске они направлены встречно, то суммарное магнитное поле должно существенно снизиться по сравнению с первоначальным магнитным полем статора. Это незамедлительно должно привести к уменьшению ЭДС в обмотке статора, — которая, как следует из векторной диаграммы, в основном, и противостоит сетевому напряжению, — и увеличить ток в двигатель. Именно это и происходит на практике: резкое увеличение тока в статоре восстанавливает суммарное магнитное поле двигателя до первоначального значения.
Вообще, поскольку в момент пуска ротор не вращается, вся магнито-электрическая система АД по всем процессам практически точно воспроизводит процессы в трансформаторе и он сам, в этот момент, является трансформатором. В частности, в трансформаторе возникает такое же взаимное подавление магнитных потоков первичной и вторичной обмоток ( см. «Трансформаторы») и многократное увеличение рабочего тока — по сравнению с током холостого режима — в первичной обмотке при замыкании вторичной на внешнюю нагрузку. Увеличение пускового тока АД в момент пуска создает опасность для целостности обмотки статора и требует на практике дополнительных мер безопасности — например, включение в цепь АД ограничивающих пусковых реостатов.
В. Режим холостого хода
Этот режим характеризуется отсутствием нагрузки на валу двигателя и, как следствие, высокой скоростью вращения ротора. Коэффициент скольжения при этом находится в пределах 0,02 ≤ s ≤ 0,05. Это значит, что относительная скорость вращения (перемещения) ротора и статора очень мала, а следовательно, будет малой и ЭДС, наводимая магнитным полем статора в обмотках ротора.
Малость ЭДС ведет к двум следствиям: а) незначительности тока и магнитного поля ротора; б) незначительности индуктивного сопротивления обмотки ротора, хL≈ 0.
Первое следствие означает небольшую величину взаимодействия магнитных полей ротора и статора и малость вращающего момента – его величины хватает только на то, чтобы, преодолевая незначительные силы трения в подшипниках ротора, поддерживать на постоянном уровне скорость его вращения.
Второе следствие означает п е р п е н д и к у л я р н у ю ориентацию магнитных полей ротора и статора (рис.58). Действительно, на фазовой диаграмме в этом режиме вектор тока ротора, а следовательно и его магнитного потока, будет почти совпадать по фазе с вектором ЭДС обмотки ротора. Это связано с тем что сопротивление ротора будет иметь почти активный характер:
Перпендикулярность магнитных полей значительно увеличивает касательную составляющую взаимодействия, однако в режиме х/х это обстоятельство никак себя не проявляет из-за незначительной величины магнитного поля ротора. Зато это прямым образом влияет на величину тока в обмотке статора: он становится очень малым ( 3-5% от номинального). Причина этого очевидна: магнитное поле статора не встречает противодействия со стороны магнитного поля ротора и создает противоэдс сетевому напряжению даже при незначительном токе в обмотке статора. Эта ситуация воспроизводит режим работы трансформатора при разомкнутой вторичной обмотке.
Тот факт, что перпен-дикулярная ориентация маг-нитных полей ротора и стато-ра значительно увеличивает касательные взаимодействия и, тем самым, — вращающий мо-мент — используется в АД с фазным ротором. Замыкая ра-зомкнутую обмотку ротора на внешние сопротивления, тем самым резко увеличивают акти-вную составляющую ее полного сопротивления. В результате фаза тока становится близкой к фазе ЭДС, а магнитное поле ротора разворачивается пер-пендикулярно магнитному полю статора. Это увеличивает касательные взаимодействие и делает пусковой момент двигателя весьма большим.
С. Рабочий режим
Рабочий режим АД является промежуточным между рассмотренными выше режимами. Действительно, появление нагрузки означает возникновение на валу двигателя тормозного момента и замедление скорости вращения ротора. Это означает, что векторная диаграмма холостого хода должна плавно трансформироваться в векторную диаграмму режима пуска. Легко понять, что это должно проявляться:
а) в изменении угла ориентации магнитных полей ротора и статора от 900 до 1800;
б) в увеличении магнитного поля ротора от минимального значения при х/х до максимального значения при пуске.
На рис.59 представлены графики зависимости вращающего момента АД и его составляющих от скорости вращения ротора. Кривая 1 описывает поведение касательной составляющей взаимодействия, которая уменьшается с замедлением скорости вращения ротора. Кривая 2 отображает поведение самих сил взаимодействия по модулю, в частности их увеличение с замедлением вращения ротора. В итоге полный вращающий момент двигателя приобретает «колоколообразную» форму (рис.59, «3»).
Зависимость вращающего момента , М вр, от скорости вращения ротора (чаще: от коэффициента скольжения, s) называют механической характеристикой (МХ) асинхронного двигателя.
Нетрудно видеть, что МХ довольно сильно отличается от соответству-ющих характеристик двигателей постоянного тока (рис.51 «а»; «б»). Принципиальным отличием является наличие на ней н и с п а д а ю щ е г о участка, означающего снижение крутящего момента при замедлении скорости вращения ротора двигателя. Этот факт означает, что при превышении противодействующим моментомзначения Мкр – максимального вращающего момента, который может развить двигатель — скорость вращения двигателя упадет до нуля, т.е. до s = 1, и двигатель — если момент не убрать — остановится. Указанный фактор для ряда приложений является неприемлемым, что ограничило диапазон применения двигателей с короткозамкнутым ротором.
Нормальный рабочий режим двигателя осуществляется при Мном. На практике он в 2-3 раза меньше максимальноого момента Мкр.
Отличия от машин постоянного тока
Принципиальная конструкционная разница заключается в расположении обмотки. В системах переменного тока она охватывает статор, а в машинах постоянного тока – ротор. В обеих группах электродвигатели различаются по типу возбуждения тока – смешанные, параллельные и последовательные. Сегодня машины переменного и постоянного тока используются в промышленности, сельском хозяйстве и в бытовой сфере, однако первый вариант более привлекателен по своим эксплуатационным качествам. Генераторы и двигатели переменного тока выигрывают за счет более технологичной конструкции, надежности и высокой энергетической отдачи.
Применение устройств, работающих на постоянном токе, распространено в сферах, где на первый план выходят требования к точности регулирования рабочих параметров. Это могут быть тяговые механизмы транспорта, обрабатывающие станки и сложные измерительные приборы. В плане производительности машины постоянного и переменного тока имеют высокий КПД, но с разными возможностями технико-конструкционной подстройки под конкретные условия применения. Работа с постоянным током дает больше возможностей для управления частотой вращения, что важно при обслуживании серводвигателей и шаговых моторов.
Назначение
По эксплуатационным характеристикам машины Iпер. превосходят аналоги на Iпост, потому им отдают предпочтение, их преимущества:
- технологичная конструкция;
- надежность;
- высокая энергетическая отдача.
В то же время они уступают устройствам Iпост. в точности регулирования рабочих параметров. Потому двигатели электротранспорта, сложных измерительных приборов и некоторых обрабатывающих станков работают на Iпост. В большинстве же случаев применяются машины Iпер.. Асинхронные двигатели отличаются простотой и используются чаще всего и в самых разных областях.
Устройство асинхронной МПТ
Для технической основы данного устройства в виде ротора и статора используется листовая сталь, которую перед сборкой покрывают изоляционным масляно-канифольным слоем с обеих сторон. В машинах малой мощности сердечник может выполняться из электрической стали без дополнительного покрытия, поскольку изолятором в данном случае выступает естественный оксидный слой на металлической поверхности. Статор фиксируется в корпусе, а ротор на валу. В асинхронных машинах переменного тока большой мощности сердечник ротора может крепиться и на ободе корпуса втулкой, насаженной на вал. Непосредственно вал должен вращаться на подшипниковых щитах, которые также фиксируются к основе корпуса.
Внешние поверхности ротора и внутренние поверхности статора изначально обеспечиваются пазами для размещения проводников обмотки. У статора машин переменного тока обмотка чаще выполняется трехфазной и подключается к соответствующей сети на 380 В. Ее также называют первичной. Аналогично выполняется и обмотка ротора, окончания которой обычно формируют соединение в конфигурации звезды. Предусматриваются и контактные кольца, через которые дополнительно может подключаться реостат для регулировки или трехфазный пусковой элемент.
Важно отметить и параметры воздушного зазора, который выполняет функцию демпферной зоны, снижающей шум, вибрации и нагрев при работе устройства. Чем габаритнее машина, тем больше должен быть зазор. Его величина может варьироваться от одного до нескольких миллиметров. Если конструкционно невозможно оставить достаточно места для воздушной зоны, то предусматривается система дополнительного охлаждения установки.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым. Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы асинхронной МПТ
Трехфазную обмотку в данном случае подключают к симметричной сети с трехфазным напряжением, в результате чего в воздушном зазоре формируется магнитное поле. Относительно обмотки якоря принимаются специальные меры для достижения гармонического пространственного распределения поля для демпферного зазора, что образует систему вращающихся магнитных полюсов. Согласно принципу действия машины переменного тока, на каждом полюсе формируется магнитный поток, который пересекает контуры обмотки, тем самым провоцируя генерацию электродвижущей силы. В трехфазной обмотке индуцируется трехфазный ток, обеспечивающий вращающий момент двигателя. На фоне взаимодействия тока ротора с магнитными потоками происходит формирование электромагнитной силы на проводниках.
Если ротор под действием внешней силы приводится в движение, направление которого соответствует направлению потоков магнитного поля машины переменного тока, то ротор начнет обгонять темпы вращения поля. Это происходит в тех случаях, когда частота вращения статора превосходит номинальную синхронную частоту. В то же время будет изменено направление движения электромагнитных сил. Таким образом формируется тормозящий момент с обратным действием. Данный принцип работы позволяет использовать машину и в качестве генератора, работающего в режиме отдачи активной мощности в сеть.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателя
Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Устройство и принцип действия синхронных МПТ
В части исполнения и расположения статора синхронная машина похожа на асинхронную. Обмотка называется якорем и выполняется с тем же количеством полюсов, как и в предыдущем случае. У ротора предусматривается обмотка возбуждения, энергетическое снабжение которой обеспечивают контактные кольца и щетки, подключенные к источнику постоянного тока. Под источником подразумевается маломощный генератор-возбудитель, устанавливаемый на одном валу. В синхронной машине переменного тока обмотка выполняет функцию генератора первичного магнитного поля. В процессе проектирования конструкторы стремятся создавать условия для того, чтобы индукционное распределение поля возбуждения на поверхностях статора было как можно ближе к синусоидальному.
При повышенных нагрузках обмотка статора формирует магнитное поле с вращением в направлении ротора с аналогичной частотой. Таким образом образуется единое поле вращения, при котором поле статора будет оказывать воздействие на ротор. Данное устройство машин переменного тока позволяет их использовать как электродвигатели, если изначально обеспечивается подводка трехфазного тока к синхронной обмотке. Такие системы создают условия для координированного вращения ротора с частотой, соответствующей полю статора.
Принцип действия и устройство электрических машин переменного тока. Синхронные машины
Машины переменного тока по устройству несколько отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока, у машин переменного тока на статоре обычно укладывают обмотку якоря, а на роторе — обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения.
Синхронными называют такие машины переменного тока, у которых скорость вращения ротора и частота переменного тока в обмотках изменяются одновременно и пропорционально друг другу, т. е. синхронно. С изменением частоты тока у таких машин одновременно (синхронно) меняется число оборотов.
Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т.е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
Так как на судах морского флота сети переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток — фаз, сдвинутых относительно друг друга на 120° (1/3 периода) с таким расчетом, чтобы индуктируемая э.д.с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э.д.с. соседней фазы. Обмотку возбуждения укладывают на роторе и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный на одном валу с синхронным генератором, или аккумуляторная батарея.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмоток статора отходят три провода (три контакта). Продольный разрез синхронного генератора трехфазного переменного тока с возбудителем показан на рис. 172.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемого постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магнитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
На рис. 173, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в — соединение обмотки статора в треугольник и в звезду. При соединении в треугольник начало первой фазы I соединяется с концом II, начало II — с концом III и начало III — с концом I.
При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности. За последние годы на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. При этом схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на клеммах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор работал в режиме двигателя, нужно отключить первичный двигатель и к фазным обмоткам статора подвести трехфазный ток из сети.
В этом случае генератор станет синхронным Электродвигателем, потребляющим ток. Проходя по фазным обмоткам, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же скоростью, как вращающееся магнитное поле. При этом генератор не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Регулирование скорости вращения ротора синхронного двигателя производится изменением частоты тока сети, а изменение направления вращения ротора — переключением двух любых фаз, т.е. взаимным пересоединением двух питающих проводов.
Похожие статьи
- Судовые электрические станции
- Асинхронные двигатели
- Трансформаторы
- Обслуживание электрических машин постоянного тока
- Двигатели постоянного тока
- Генераторы постоянного тока
- Принцип действия, устройство электрических машин постоянного тока
- Работа и мощность тока
- Закон Джоуля-Ленца, физический закон
- Электрическая цепь и электрическое сопротивление
Rating 0.00 (0 Votes)
Явнополюсные и неявнополюсные синхронные машины
Главным отличием явнополюсных систем является присутствие в конструкции выступающих полюсов, которые крепятся к специальным выступам вала. В типовых механизмах фиксация выполняется с помощью Т-образных хвостовых крепежей к ободу крестовины или валу через втулку. В устройстве машин переменного тока малой мощности эта же задача может решаться болтовыми соединениями. В качестве материала обмотки используется полосовая медь, которую наматывают на ребро, изолируя специальными прокладками. В наконечниках с полюсами в пазах размещаются стержни обмотки для пуска. В этом случае применяется материал с высоким удельным сопротивлением наподобие латуни. Контуры обмотки по торцам приваривают к короткозамыкающим элементам, образуя общие кольца для короткого замыкания. Явнополюсные машины с силовым потенциалом на 10-12 кВт могут выполняться в так называемой обращенной конструкции, когда якорь вращается, а полюса индуктора сохраняют неподвижное состояние.
У неявнополюсных машин конструкция базируется на цилиндрическом роторе, выполняемом из стальной поковки. В роторе присутствуют пазы для формирования обмотки возбуждения, полюса которой рассчитываются на высокие частоты вращения. Однако применение такой обмотки в электрических машинах с переменным током большой мощности невозможно из-за высокой степени износа ротора в жестких условиях эксплуатации. По этой причине даже в установках средней мощности для роторов применяют высокопрочные компоненты из цельных поковок на основе хромоникельмолибденовых или хромоникелевых сталей. В соответствии с техническими требованиями к прочности, максимальный диаметр рабочей части у ротора неявнополюсной синхронной машины не может быть выше 125 см. Это объясняет необычный форм-фактор ротора с удлиненным корпусом, хотя и по данному параметру есть ограничения, связанные с увеличением вибраций у слишком длинных элементов. Предельная длина ротора составляет 8,5 м. К неявнополюсным агрегатам, которые используются в промышленности, можно отнести различные турбогенераторы. С их помощью, в частности, связывают рабочие моменты паровых турбин с тепловыми энергостанциями.
Особенности вертикальных гидрогенераторов
Отдельный класс явнополюсных синхронных МПТ, обеспеченных вертикальным валом. Такие установки подключаются к гидравлическим турбинам и подбираются под мощности обслуживаемых потоков по частоте вращения. Большинство машин переменного тока данного типа являются тихоходными, но при этом имеют большое количество полюсов. Среди ответственных рабочих компонентов вертикального гидрогенератора можно отметить упорный подшипник и подпятник, на который приходится нагрузка от вращающихся частей движка. На подпятник, в частности, накладывается и давление от потоков воды, которая действует на турбинные лопасти. Кроме того, для остановки вращения предусматривается тормоз, а в рабочей структуре также присутствуют направляющие подшипники, воспринимающие радиальные усилия.
В верхней части машины наряду с гидрогенератором могут размещаться вспомогательные агрегаты – например, возбудитель генератора и регулятор. К слову, последний представляет собой самостоятельную машину переменного тока с обмоткой и полюсами на постоянных магнитов. Данная установка обеспечивает питание двигателя для обеспечения функции автоматического регулятора. В больших вертикальных гидрогенераторах возбудитель может заменяться синхронным генератором, который вместе с возбудительными узлами и ртутными выпрямителями обеспечивает энергоснабжение силовых устройств, обслуживающих рабочий процесс основного гидрогенератора. Конфигурация машины с вертикальным валом также используется в качестве приводного механизма мощных гидравлических насосов.
Коллекторные МПТ
Наличие коллекторного узла в конструкции МПТ зачастую обуславливается необходимостью выполнения функции преобразования частоты вращения в электрической связи разночастотных цепей на обмотках ротора и статора. Это решение позволяет наделять устройство дополнительными эксплуатационными свойствами, в числе которых автоматическая регуляция рабочих параметров. Коллекторные машины переменного тока, которые подключаются к трехфазным сетям, получают по три щеточных пальца в каждом сегменте двойного полюсного деления. Соединение щеток между собой выполняется по параллельной схеме перемычками. В этом смысле коллекторные МПТ похожи на электродвигатели с постоянным током, но отличаются от них количеством применяемых щеток на полюсах. Помимо этого, статор в данной системе может иметь несколько дополнительных обмоток.
Замкнутая обмотка якоря при использовании коллектора с трехфазными щетками будет представлять собой трехфазную комплексную обмотку с соединением в виде треугольника. В процессе вращения якоря каждая фаза обмотки сохраняет неизменную позицию, однако секции поочередно переходят от одной фазы к другой. Если в коллекторной машине переменного тока используется шестифазный комплект щеток со сдвигом на 60° относительно друг друга, то формируется шестифазная обмотка с соединением по схеме многоугольника. На щетках многофазной машины с коллекторной группой частота тока определяется вращением магнитного потока по отношению к неподвижным щеткам. Направление вращения ротора может быть как встречным, так и согласованным.
Применение МПТ
Сегодня МПТ используются всюду, где в том или ином виде требуется генерация механической или электрической энергии. Крупные производительные агрегаты применяются в обслуживании инженерных систем, энергетических станций и подъемно-транспортных узлов, а маломощные – в обычной бытовой технике от вентиляторов до насосов. Но в обоих случаях назначение машин переменного тока сводится к выработке энергетического потенциала в достаточном объеме. Другое дело, что имеют принципиальное значение конструкционные отличия, реализация внутренней конфигурации статора и ротора, а также управляющая инфраструктура.
Хотя общее устройство МПТ на протяжении длительного времени сохраняет один и тот же набор функциональных компонентов, повышающиеся требования к эксплуатации таких систем заставляют разработчиков вносить дополнительные органы контроля и управления. На современном этапе технологического развития особенно в контексте применения машин переменного тока в производственной сфере эксплуатацию подобных двигателей и генераторов сложно представить без высокоточных средств регуляции рабочих параметров. Для этого используются самые разные способы управления – импульсный, частотный, реостатный и т.д. Внедрение автоматики в регулирующую инфраструктуру также является характерной чертой современной эксплуатации МПТ. Управляющая электроника подключается к силовой установке с одной стороны, а с другой – к программным контроллерам, которые по заданному алгоритму дают команды на установку конкретных параметров работы механизма.