26 мая 2016
управление двигателемTexas Instrumentsстатья
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
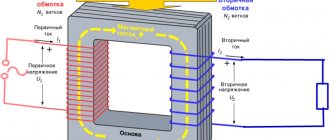
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.
Рис. 1. Электромагнетизм в основе работы электродвигателя
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Рис. 2. Перемещение проводника с током в магнитном поле (Сила Лоренца)
Выбор драйвера для шагового двигателя MT-1703HD200AW. Сравнение между DRV8825 и А4988
Драйвер — это посредник между шаговым двигателем (ШД) и источником управляющих воздействий. С его помощью производится управление ЩД с возможностью точного позиционирования вала ШД. Основная задача драйвера в том, чтобы в зависимости от входного сигнала подавать соответствующее напряжение на обмотки шагового двигателя. [1]
Задача состоит в экспериментальном определении наиболее оптимального драйвера для ШД MT-1703HD200AW. Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которых двигатель перестает, вращаться стабильно. Граничные частоты являются рекомендованными для создания устройств на базе данных ШД и драйвера.
Управление ШД осуществляется через входы драйвера «ENABLE», «MS1», «MS2», «MS3», «STEP» и «DIR».
– ENABLE — отвечает за включение драйвера;
– «MS1», «MS2», «MS3» — отвечают за переключения микрошаговых режимов.
– DIR — отвечает за направление вращения ШД;
– STEP — отвечает за прием импульсов вращения.
Тип шагового двигателя является самым важным фактором при выборе драйвера шагового двигателя. В нашем исследовании будем использовать биполярный шаговый двигатель MT-1703HD200AW.
Стоит обратить внимание на силу тока, которую может обеспечить драйвер. Нужно выбирать драйвер, который будет обеспечивать ток, не меньше тока фазы выбранного шагового двигателя. [2]
Напряжение питания влияет на динамику, вибрации, нагрев двигателя и драйвера.
Наличие микрошаговых режимов обеспечивает плавность работы ШД на малых оборотах и высокую разрешающую способность угла позиционирования. Использование режима микрошага уменьшает резонансный эффект ШД. При возникновении, которого ШД начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала.
Для данной работы были выбраны два драйвера DRV8825 и А4988. Драйвер А4988 создан компанией Allegro, а драйвер DRV8825 создан компанией TI (Texas Instruments Inc.). Расположение выводов и интерфейс этих модулей практически совпадают. Что позволяет производить замену драйверов в устройствах без изменения разводки платы, но с возможным редактированием программного кода управления.
Рис. 1. Драйвер шагового двигателя А4988 и DRV8825
Основные отличия между драйверами DRV8825 и A4988:
У драйвера DRV8825 есть выход FAULT, а у драйвера А4988 он отсутствует. FAULT — выход сигнализации срабатывания защиты. На данном выходе сигнал логического «0» обозначает что, полевые транзисторы Н-моста были отключены в результате защиты от перегрузки по току или из-за перегрева.
Вывод SLEEP на DRV8825 не подтянут к питанию по умолчанию, как на A4988, но он соединён на плате с выводом FAULT через 10k резистор.
Различное расположение потенциометра, регулирующего предельный ток. Разное отношение предельного тока к опорному напряжению.
Драйвер на DRV8825 поддерживает 1/32-шаг в микрошаговом режиме. У A4988 максимум 1/16-шага. Вход 1/16-шагового режима на А4988 соответствует 1/32-шаговому на DRV8825. Остальные режимы переключения драйверов совпадаю.
DRV8825 поддерживает более высокое напряжение питания 8,2..45В, а A4988 8…35В. Это означает, что драйвер DRV8825 безопаснее при работе с высоким напряжением и менее восприимчив к индуктивно-ёмкостным скачкам напряжения.
Драйвер DRV8825 обеспечивает ток до 1,5А на фазу без радиатора, а А4988 1А.
Драйвер А4988 дешевле драйвера DRV8825.
В таблице — 1 и 2, при напряжении питания драйвера 4,5В, разгоняем ШД плавно от стабильного запуска и до частоты срыва, для различных микрошагов. Определили предельное значение частоты, при которой ШД стабильно запускается.
Таблица 1
Частоты запуска исрыва ШД сдрайвером А4988
| Назначение микрошага | Оптимальная частота плавного перехода при 4.5 В | Предельное значение запуска ШД | |
| запуск | предел | ||
| Полный шаг | 850 Гц / 255 об/мин | 9000 Гц / 2700 об/мин | 1000 Гц |
| Половина шага | 1500 Гц / 450 об/мин | 2560 Гц / 768 об/мин | 2500 Гц |
| Четверть шага | 3050 Гц / 915 об/мин | 31500 Гц / 9450 об/мин | 4500 Гц |
| Одна восьмая шага | 6200 Гц / 1 860 об/мин | 91100 Гц / 27330 об/мин | 7900 Гц |
| Одна шестнадцатая шага | 12500 Гц / 3750 об/мин | 192300 Гц / 57690 об/мин | 15300 Гц |
Таблица 2
Частоты запуска исрыва ШД сдрайвером DRV8825
| Назначение микрошага | Оптимальная частота плавного перехода при 4.5 В | Предельное значение запуска ШД | |
| запуск | предел | ||
| Полный шаг | 700 Гц / 210 об/мин | 1780 Гц / 534 об/мин | 1300 Гц |
| Половина шага | 1200 Гц / 180 об/мин | 10400 Гц / 1560 об/мин | 2800 Гц |
| Четверть шага | 2600 Гц / 195 об/мин | 67000 Гц / 5025 об/мин | 5700 Гц |
| Одна восьмая шага | 5100 Гц / 191,25 об/мин | 93000 Гц / 3100 об/мин | 13400 Гц |
| Одна шестнадцатая шага | 10500 Гц / 196,875 об/мин | 389000 Гц / 7293,75 об/мин | 26700 Гц |
| Одна тридцать вторая шага | 19000 Гц / 178,125 об/мин | 463000 Гц / 4340,625 об/мин | 55000 Гц |
Из таблицы 1 и 2 видно, что драйвер А4988 начинает работать стабильно при меньших значениях частот, чем драйвер DRV8825, но частота срыва у драйвера DRV8825 значительно больше при шаге 1/8 и 1/16, что делает драйвер DRV8825 более привлекательным при работе ШД MT-1703HD200AW на малых оборотах.
Литература:
- Пушкарев, О. «Первый шаг» шагового двигателя / О. Пушкарев //Современная электроника. — 2004. — № 1. — С. 46–47.
- Вычужанин, В. Управление шаговым электродвигателем с помощью ПЛИС / В. Вычужанин // Компоненты и технологии. — 2004. –№ 3. — С. 96–98.
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.
Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Схема простого драйвера для униполярного шагового двигателя
Схема драйвера униполярного шагового двигателя, описанная в данной статье, реализует следующие задачи: • управление 4-фазовым униполярным шаговым двигателем. • обеспечивает плавную регулировку скорости вращения и изменение направления вращения. • выполняет функцию остановки двигателя.
Электрический паяльник с регулировкой температуры
Мощность: 60/80 Вт, температура: 200’C-450’C, высококачествен…
Подробнее
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.
Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью потенциометра PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.
Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.
Профессиональный цифровой осциллограф
Количество каналов: 1, размер экрана: 2,4 дюйма, разрешен…
Подробнее
Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы. Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.
Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
Рисунок печатной платы (8,5 KiB, скачано: 2 060)
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
Рис. 4. Принцип действия бесколлекторного электродвигателя (BLDC)
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).
Рис. 5. Чередование фаз при вращении BLDC
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.
Рис. 6. Датчики положения ротора электродвигателей
Пункт первый (набившим плату можно не читать J). После травления, лужения, и сверловки, внимательно осмотрите всю плату на предмет косяков. Сопли, протравленные дорожки, и т.д. могут серьезно обломать весь кайф. Далее набиваем плату, сначала все перемычки, затем сопротивления, диоды, панели, емкости и биполярные транзисторы. Хочу обратить особое внимание на Ваше внимание, извините за… Не ленитесь перед впайкой проверить деталь на исправность. Прозвонка иногда спасает от дыма… Я зная цветовую кодировку резисторов на ура, подкалывался несколько раз, причем со спец. эффектами. Когда используешь резисторы из загашников которые годами выпаивались из всего что под руку попадет, забываешь, что при нагреве красный может стать оранжевым, а оранжевый — желтым… Впаиваем провода питания +5В, степ, GND, и провода контроля Vref. Примерно вот так это выглядит:
Пункт второй (настраиваем режимы работы и удержания). 555 я лично впаиваю в плату, кто поставил панель, значит втыкаем, блок индикации должен быть отключен. Подстроечники на середину. Вывод степ замыкаем на общий (раб. режим). Прозваниваем цепь +5В и если нет короткого, включаем питание. Тестер подключен к контрольным точкам Vref (молодец Dj_smart, предусмотрел на плате), если номиналы подстроечников и сопротивления между ними соответствуют схеме, то подстроечником раб. режима можно регулировать напряжение около 0 – 1В т.е. ток 0 – 5А. Настроим на 1А. Тут все просто. Rизм. у нас 0,2 Ом. Нам нужен 1А. 0,2х1=0,2В. Т.е. если мы установим Vref – 0,2В, ток в обмотке будет 1А. Если нам нужен ток в обмотке скажем 2,5А, то Vref=0,2х2,5=0,5В.
Короче мы выставили 0,2В.
Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:
Главное обратите внимание на обязательную задержку при переключении. При замыкании степ на общий, мгновенно должен включаться рабочий режим, а при размыкании уходить на удержание с задержкой 0.5с. Если задержки нет ищите проблемы, иначе при работе будут не хилые глюки. Если не заводится, идите в тему форума, не устраивайте пожаровJ.
Пункт третий (настраиваем блок индикации). Печатка разведена под 315-361, как и у Dj_smarta тоже мешок, надо куда то паять… Но в принципе туда можно паять любую пару, из наших я испытывал 502 – 503, 3102 – 3107, все пашет, только будьте внимательны с цоколевкой! Если все правильно впаяно и рабочее, то работает без проблем. Индикация вносит небольшую корректировку в Vref, так что после подключения индикации, окончательно отрегулируйте ток под свой ШД (лучше для начала 70% от номинального). Фотки как горят светодиоды делать не стал J.
Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:
Либо на 16 ноге, он такой:
Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ!!! Это важно!!! Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы.
Пункт пятый. Опять выключаем питание и вставляем IR, впаиваем полевики. При использовании ШД с током обмотки более 2,5А, необходимо полевики вынести на радиатор. Обратите внимание при впайке диодов, они могут различаться по меткам. Мне правда не встречалось (у меня в перемешку 522 и 1N4148 (аналог) у них цоколевка совпадает) Но учитывая что людям IR с неправильной логикой работы попадаются, будьте внимательны. По цепям питания проверяем на коротыш, проверяем монтаж. Я сразу включал все питание, только вместо ШД припаивал соединенные встречно параллельно светодиоды:
Если они шагают, значит все ОК, подрубаем мотор, подключаем к ЛПТ или интерфейсной плате с опторазвязкой (кому как нравиться) и балдеем .
Данное описание не претендует на бестселлер, оно может дополняться и критиковаться но только по существу…
Проверяем L297 с помощью ТМ2
Короче суть прикола .
Шим у нас около 20кГц. Не услышим. Собираем на ТМ2 делитель на 2, при 10 кгц — уже будет пищать на всю. Вот схема Вывод 3 соединяем с выводом 1 L297. Вывод 5 через конденсатор 0,01-0,1 мкф на наушник, второй конец наушника — на массу. Тэкс… Да, питание у неё — 14-я +5, 7-я — масса. Остальные ноги оставляем свободными.
[47,38 Kb] (cкачиваний: 1289) схему и печатку от delta24
Обсуждение в закрытой части форума (только для постоянных пользователей, для получения доступа обращайтесь к delta24 )
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).
Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.
Рис. 9. Полушаговый режим управления ШД
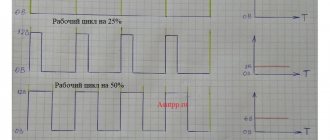
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
Рис. 10. Управление ШД в режиме микрошага
Работа шагового двигателя
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает угловые перемещения (шаги) ротора.
Шаговые двигатели, имеют достаточно высокую надежность и большой срок службы. При увеличении скорости двигателя, уменьшается вращающийся момент. Шаговые двигатели дают больше вибрации наряду с другими типами двигателей, поскольку дискретный шаг имеет тенденцию хватать ротор от одного положения к другому. Из-за этого шаговый двигатель более шумный. Вибрация может быть сильная, что может привести двигатель к потери момента потому, что вал находится в магнитном поле и ведет себя как пружина. Шаговые двигатели работают без обратной связи, то есть не используют Энкодеры или резольверы для определения положения.
Существует четыре главных типа шаговых двигателей:
- Шаговые двигателя с постоянным магнитом
- Гибридный шаговые двигателя
- Двигатели с переменным магнитным сопротивлением
- Биполярные и униполярные шаговые двигатели
Шаговые электродвигатели состоят из статора с обмотками возбуждения и ротора из магнитомягкого или из магнитотвёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках. В зависимоти от конструкции ротора выделяют следующие разновидности шаговых двигателей: с постоянными магнитами (ротор из магнитотвёрдого материала), реактивный (ротор из магнитомягкого материала), гибридный. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
В машиностроении более распространены высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения. Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.
Рис. 11. Блок-схемы систем управления двигателем
Так, у интегрированного драйвера TI DRV8312 максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера DRV8301 этот показатель не превышает 37°С.
Рис. 12. Смена направления вращения коллекторного двигателя
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
Рис. 13. Режимы вращения, быстрого и медленного торможенияс
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
ОБОРУДОВАНИЕ ТЕХНОЛОГИИ РАЗРАБОТКИ
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
- обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
- коммутация обмоток; включение;
- выключение;
- смена полярности;
Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:
- обеспечение быстрого нарастания тока при включении и быстрого спада при выключении;
- уменьшение тока для фиксации положения остановленного двигателя;
- защитные функции;
- формирование тока и напряжения обмоток для микрошагового режима;
- и многие другие.
Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.
По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйверы для этих двух вариантов двигателей принципиально отличаются.
- Драйвер униполярного шагового двигателя.
- Схема драйвера униполярного шагового двигателя.
- Драйвер биполярного шагового двигателя.
- Схема драйвера биполярного шагового двигателя.
- Драйвер биполярного шагового двигателя L298N.
- Характеристики микросхемы L298N на русском языке.
- Схема включения драйвера L298N.
Драйвер униполярного шагового двигателя.
В униполярном режиме могут работать двигатели, имеющие следующие конфигурации обмоток.
Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так.
Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться.
Схема драйвера униполярного шагового двигателя.
Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
- максимально допустимый ток 4 А;
- предельное напряжение 55 В;
- сопротивление в открытом состоянии 0,05 Ом;
- порог включения 1 В;
- выполнены в миниатюрном корпусе SO-8;
- в корпусе два транзистора.
Крайне удобный вариант для использования в драйвере униполярного шагового двигателя.
- Нет необходимости в радиаторах охлаждения ключей;
- очень низкое падение напряжения на открытом транзисторе;
- малые размеры;
- всего два 8ми выводных корпуса для драйвера двухфазного шагового двигателя.
На биполярных транзисторах ключи с такими параметрами создать не возможно. Есть много других вариантов MOSFET транзисторов для ключей, например IRF7313 ( 6 А, 30 В, 0,029 Ом).
Схема ключа на MOSFET транзисторе для одной фазы выглядит так.
Ключ управляется непосредственно от микроконтроллера логическими уровнями KMOП или TTL ( 0 / +5 В). При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру.
Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер. А замыканий обмоток шаговых двигателей практически не бывает. Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой.
Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует.
А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip.
Простая плата с восьми разрядным микроконтроллером PIC18F2520 управляет:
- двумя шаговыми двигателями с током фазы до 3 А;
- двумя ШИМ ключами для электромагнитов;
- считывает состояние 4х датчиков;
- обменивается данными по сети с центральным контроллером.
Этот контроллер используется в составе системы управления шаговыми двигателями практически во всем фасовочном оборудовании фирмы ”РОСТ”.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
- полно-шаговый, одна фаза на полный шаг;
- полно-шаговый, две фазы на полный шаг;
- полу-шаговый;
- фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
- простой, дешевый, надежный драйвер.
К недостаткам:
- в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Пример практической схемы простого контроллера униполярного шагового двигателя.
Статья о подключении униполярного шагового двигателя к плате Ардуино.
Драйвер биполярного шагового двигателя.
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.
У биполярного двигателя по одной обмотке для каждой фазы. Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка:
- подключается в прямой полярности к источнику напряжения;
- отключается от источника напряжения;
- подключается с противоположной полярностью.
Схема коммутации одной обмотки биполярного двигателя выглядит так.
Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения.
Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и:
- сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле;
- проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).
Сквозные токи могут возникать из-за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться.
Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе.
Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0.22 Ом в коммутируемых цепях. В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток. К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя. Самым распространенным из них является микросхема L298N.
Драйвер биполярного шагового двигателя L298N.
Описания этой микросхемы на русском языке практически нет. Поэтому привожу параметры L298N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l298n.pdf).
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.
Структурная схема L298N выглядит так.
Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.
Назначение выводов L298N.
| 1 | Sense A | Между этими выводами и землей подключаются резисторы — датчики тока для контроля тока нагрузки. Если контроль тока не используется, они соединяются с землей. |
| 15 | Sense B | |
| 2 | Out 1 | Выходы моста A. |
| 3 | Out 2 | |
| 4 | Vs | Питание нагрузки. Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 5 | In 1 | Входы управления мостом A. TTL совместимые уровни. |
| 7 | In 2 | |
| 6 | En A | Входы разрешения работы мостов. TTL совместимые уровни. Низкий уровень сигналов запрещает работу моста. |
| 11 | En B | |
| 8 | GND | Общий вывод. |
| 9 | Vss | Питание логической части микросхемы (+ 5 В). Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 10 | In 3 | Входы управления мостом B. TTL совместимые уровни. |
| 12 | In 4 | |
| 13 | Out 3 | Выходы моста B. |
| 14 | Out 4 |
Предельно допустимые параметры L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания | 50 В |
| Vss | Напряжение питания логики | 7 В |
| Vi, Ven | Напряжение логических входов | -0,3…7 В |
| Io | Выходной ток (для каждого канала)
| 3 А 2,5 А 2 А |
| Vsens | Напряжение датчиков тока | -1…2,3 В |
| Ptot | Мощность рассеивания (температура корпуса 75°C) | 25 Вт |
| Top | Рабочая температура кристалла | -25…130 °C |
| Tstg | Температура хранения | -40…150 °C |
Параметры расчетов тепловых режимов.
| Обозначение | Параметр | Значение |
| Tth j-case | Тепловое сопротивление кристалл-корпус | 3 ºC/Вт |
| Tth j-amb | Тепловое сопротивление кристалл-окружающая среда | 35 ºC/Вт |
Электрические характеристики драйвера L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания (вывод 4) | Vih+2.5 …46 В |
| Vss | Питание логики | 4,5… 5 …7 В |
| Is | Потребляемый ток покоя (вывод 4)
| 13 … 22 мА 50 … 70 мА 4 мА |
| Iss | Потребляемый ток покоя (вывод 9)
| 24 … 36 мА 7 … 12 мА 6 мА |
| Vil | Входное напряжение низкого уровня (выводы 5, 7, 10, 12, 6, 11) | -0,3 … 1,5 В |
| Vih | Входное напряжение высокого уровня (выводы 5, 7, 10, 12, 6, 11) | 2,3 … Vss В |
| Iil | Входной ток низкого уровня (выводы 5, 7, 10, 12, 6, 11) | -10 мкА |
| Iih | Входной ток высокого уровня (выводы 5, 7, 10, 12, 6, 11) | 30 … 100 мкА |
| Vce sat (h) | Напряжение насыщения верхнего ключа
| 0,95…1,35…1,7 В 2 … 2,7 В |
| Vce sat (l) | Напряжение насыщения нижнего ключа
| 0,85…1,2…1,6 В 1,7 … 2,3 В |
| Vce sat | Общее падение напряжения на открытых ключах
| 1,8 … 3,2 В 1,8 … 4,9 В |
| Vsens | Напряжение датчиков тока (выводы 1, 15) | -1 … 2 В |
| Fc | Частота коммутаций | 25 … 40 кГц |
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.
Диаграмма работы этой схемы в полношаговом режиме выглядит так.
Если не используются разрешающие входы и датчики тока, схема выглядит так.
А вот фрагмент схемы контроллера биполярного шагового двигателя.
По функциям это аналог контроллера описанного в главе про униполярные двигатели, только для биполярного. Он также собран на PIC контроллере фирмы Microchip и управляет двумя биполярными шаговыми двигателями с током фаз до 2 А. Функциональные возможности и режимы управления двигателем те же.
К достоинствам управления шаговым двигателем в биполярном режиме следует отнести:
- крутящий момент примерно на 40 % больше по сравнению с униполярным режимом.
- можно подключать шаговые двигатели с любой конфигурацией обмоток.
К недостаткам:
- сложный драйвер.
Еще одна схема контроллера шагового двигателя.
Поддержать проект
0
Автор публикации
не в сети 3 дня
Эдуард
214
Комментарии: 1748Публикации: 178Регистрация: 13-12-2015
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
↑ Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом — то есть максимально мощный и экономичный двигатель.
Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер , вполне подойдет FL42STH38-1684
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.
Рис. 14. Драйверы TI для управления шаговыми двигателями
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).
Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Драйвер шагового двигателя
драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться). Стандартом управления являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Управлять шаговым двигателем сложнее, чем обычным коллекторным двигателем, нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления шаговыми двигателями были разработаны специальные устройства называемые драйверами. Они позволяет управлять вращением ротора в соответствии с сигналами управления и определенным образом делить физический шаг на более мелкие дискреты.
К драйверу подключается источник питания, шаговый двигатель и сигналы управления с платы контроллера. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы шагового двигателя могут иметь дополнительные функции:
- Контроль перегрузок по току.
- Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
- Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
- Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
- Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
- Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
- Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
Драйверы шаговых двигателей различаются по сложности. Современные драйверы можно комбинировать с множеством различных типов шаговых двигателей. Настройки для конкретного двигателя обычно настраивается пользователем во время установки. Но в целом драйверы шаговых двигателей — относительно простые устройства.
На иллюстрации выше изображен драйвер A4988. Задача компонентов, состоит в том, чтобы реагировать импульсные команды шага, поступающие от контроллера машины и преобразовывать их в правильную схему включения-выключения, необходимую для привода шагового двигателя. Эта схема активирует фазы в правильном порядке, чтобы двигать двигатель шаг за шагом в том или ином направлении.
Здесь необходимо отметить важный момент: в драйвере шагового двигателя очень мало интеллекта. Эта функция предоставляется контроллеру 3D принтера. Фактически, драйвер выполняет только две основные функции: упорядочивание фаз и управление фазным током.
Драйвера могут поставляться как отдельный компонент, так и вместе с платы контроллеров для 3D принтеров, например таких как Creality 4.2.7.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.
Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.
Рис. 17. Блок-схема драйвера DRV8837
Выбираем драйвер шагового двигателя
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.
Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
Рис. 18. Драйверы TI для управления бесколлекторными двигателями
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
Рис. 19. Блок-схема драйвера DRV10983
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. DRV10983 отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели DRV10983Z этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Драйвер биполярных шаговых двигателей
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L298 (усиленный) 48В, 4А.
Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В.
Драйвер поддерживает режимы работы full step и half step которые можно выбрать с помощю джапмпера H/F. Джампер CTRL предназначен для установки типа двигателя униполярный/биполярный, в позиции биполярного ШИМ работает на выходы INHIBIT в противном случае на выходы ABCD. Питание драйвера 12-35В для двигателя и 15-24В для схемы, диоды D1-D8 быстрые на 3 ампера, желательно Шоттки. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит. Потенциометром RV1 устанавливается рабочий ток двигателя.
Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой.
Схема и плата нарисованы в программе Proteus 7.7.
Схема протестированна и показала полную работоспособность драйвера
Используемые радиоэлементы:
| IC | L297 | DIP | 1 |
| IC | L298 | Multiwatt | 2 |
| IC | 7805 | 1 | |
| IC | 7812 | 1 | |
| Diode | FR207 | 8 | |
| Resistor | 0R47 | 5Watt | 2 |
| CAP | 100nF | Ceramic | 7 |
| POT | 10k | Multiturn | 1 |
| Header | 40pin | DIL | 0,2 |
| Connector | 3 pin | 3 | |
| Terminal-block | 2 pin | 4 | |
| IDC | IDC10 | 1 | |
| IC_Socket | DIP20 | 1 | |
| CAP | 100uF, 50V | Electrolytic | 2 |
| CAP | 10uF, 25V | Electrolytic | 1 |
| CAP | 330uF, 100V | Electrolytic | 1 |
| CAP | 3.3nF | Ceramic | 3 |
| Resistor | 4k7 | 5 | |
| Resistor | 15k | 1 |
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
| U1, U2 | Драйвер электродвигателей | L298 | 2 | Поиск в магазине Отрон | В блокнот | |
| U3 | Микросхема | L297 | 1 | Поиск в магазине Отрон | В блокнот | |
| U4 | Линейный регулятор | LM7805 | 1 | Поиск в магазине Отрон | В блокнот | |
| U5 | Линейный регулятор | LM7812 | 1 | Поиск в магазине Отрон | В блокнот | |
| D1-D8 | Выпрямительный диод | FR207 | 8 | 1N5340BRL | Поиск в магазине Отрон | В блокнот |
| С1-С6, С10-С12, С14 | Конденсатор | 100 нФ | 10 | Поиск в магазине Отрон | В блокнот | |
| С7, С8 | Электролитический конденсатор | 220 мкФ 25 В | 2 | Поиск в магазине Отрон | В блокнот | |
| С9 | Электролитический конденсатор | 100 мкФ 10 В | 1 | Поиск в магазине Отрон | В блокнот | |
| С13 | Электролитический конденсатор | 470 мкФ 100 В | 1 | Поиск в магазине Отрон | В блокнот | |
| С15 | Конденсатор | 1000 пФ | 1 | Поиск в магазине Отрон | В блокнот | |
| R1, R2 | Резистор | 0.47 Ом | 2 | 5 Вт | Поиск в магазине Отрон | В блокнот |
| R3-R8 | Резистор | 1 кОм | 6 | Поиск в магазине Отрон | В блокнот | |
| R9 | Резистор | 15 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| RV1 | Переменный резистор | 10 кОм | 1 | Поиск в магазине Отрон | В блокнот | |
| J1 | Разъем | CONN-DIL10 | 1 | Поиск в магазине Отрон | В блокнот | |
| J2, J3 | Разъем | TBLOCK-14 | 2 | Поиск в магазине Отрон | В блокнот | |
| J4-J6 | Разъем | SIL-100-03 | 3 | Поиск в магазине Отрон | В блокнот | |
| J7 | Разъем | CONN-DIL8 | 1 | Поиск в магазине Отрон | В блокнот | |
| Добавить все | ||||||
Прикрепленные файлы:
- driver_297-298.rar (196 Кб)
Теги:
- Шаговый двигатель
- Proteus
Выбор и настройка драйвера шагового двигателя
Данный цикл статей относится к настройке шаговых двигателей — с данной задаче сталкивается любой ЧПУ-шник. Для базы мы будем брать настройку драйверов для 3D-принтера, но по факту правила подойдут к любому станку. Итак, поехали.
1. ВЫБОР ДРАЙВЕРА ШАГОВОГО ДВИГАТЕЛЯ
На что необходимо обратить внимание при выборе шагового двигателя:
- Режим его работы. Например, для осей X и Y степень вовлеченности шаговика будет максимальной (т.к. это основные координаты перемещений), а для оси Z — минимальной (в 3D принтерах единица движения по этой оси происходит только при смене слоя)
- Место использования. Тут всё просто — каковы ваши требования в части тишины. Если вы находитесь в производственном помещении, то требования к шуму будут небольшие. Если дома в отдельной комнате, то средние. Если в спальной — максимальные.
- Используемые двигатели. Данный пункт предполагает прямую зависимость по потреблению тока в ШД. Для мощных двигателей не подойдут слабые драйвера. И, конечно, слабым движкам нет никакой необходимости ставить «взрослые» драйвера.
- Точность позиционирования (или микрошаг). С одной стороны этот параметр показывает сколько необходимо сделать микрошагов на один полный шаг (1.8 градусов поворота вала или, иногда, 0.9) и по сути определяет точность. Кроме того, это понижает шум, снижает резонансы и увеличивает плавность движения. Но тут палка о двух концах — чем больше микрошагов, тем слабее момент удержания. Чтобы представить себе этот процесс, попробуйте зажать пальцами движок с режимом 1/16 и 1/256. В первом случае это сделать невозможно. Во втором достаточно легко (момент приблизительно = 1% от номинала). Кроме того, повышение микрошагов дает существенное повышение температуры, а значит мы постепенно приходим к необходимости усиления охлаждения драйверов. Ещё один интересный момент — увеличение количества микрошагов иногда является бессмысленным занятием. Для вала М6 при дроблении 1/16 мы получаем теоретическую точность позиционирования 300нм, что и так является некоторым маразмом для FDM принтеров. Т.е. на точность при выборе микрошага смотреть смысла нет.
Итак, наши варианты:
Ось Z: это самая редко используемая ось в части количества перемещений. А значит шума от неё в любом случае будет мало. Для этой оси всегда подойдет самый простой A4988. Более того, этот драйвер имеет достаточно большой запас по току — стабильные 2А, а значит подойдет не только для стандартного движка 17HS4401 (1.7А), но и для более мощного 17HS8401. Не переплачивайте за драйвера на эту ось! В крайнем случае возьмите DRV8825 в режиме 1/32.
Ось X и Y: Если вам не принципиальны шумы, то берите A4988 (1/16) или DRV8825 в режиме 1/32. Для остальных случаев наша рекомендация TMC2208 или TCM2209 (1/32). Оба движка с запасом по току, но отличаются удивительной тишиной.
Экструдер: самая сложная часть. С одной стороны двигатель по экструдеру используется очень часто, а с другой стороны в основном эти движения крайне плавные. Исключение — ретракты. Если у вас боуден, то ретракты происходят не только часто, но и на большие расстояния (4-7мм). Если директ — на меньшие расстояния. Наш выбор — либо A4988, либо TMC2208/TMC2209 в зависимости от доступного вам бюджета.
2. ПОДКЛЮЧЕНИЕ И НАСТРОЙКА
В вводной статье мы просто опишем основные этапы того, что необходимо сделать. В рамках одной статьи физически не собрать всю информацию. В дальнейшем мы будем описывать правила установки для каждой платы (или серии плат) отдельно.
ВАЖНО: соблюдайте правила подключения, т.к. в противном случае вы спалите управляющую плату!
Перед подключением для начала правильно установите джамперы для установки микрошага. Обратите внимание, что для каждого вида драйвера свой порядок установки джамперов. Например, для драйвера DRV8825 и платы BIGTREETECH SKR 1.3 необходимо использовать следующую таблицу:
Следующим пунктом после установки джамперов является собственно установка самих драйверов. Правило очень простое — необходимо совместить пины драйвера с пинами платы. Как узнать какие пины где находятся? Элементарно — наберите в гугле «НАЗВАНИЕ_ПЛАТЫ PINOUT», выпишите на листке распиновку (достаточно будет выписать пины DIR и EN). Потом наберите «НАЗВАНИЕ_ДРАЙВЕРА PINOUT» и совместите на плате эти пины. Кроме того, можно ориентироваться по направлению подстроечного резистора (расположен на драйвере, похож на головку винта), с помощью которого мы дальше будем регулировать VRef.
ВАЖНО: Не забудьте поставить на драйвер радиатор, т.к. драйвер — один из самых горячих модулей, а перегрев чреват пропусками шагов
.
После установки драйвера необходимо правильно отрегулировать VRef. Это число зависит как от самого драйвера, так и от используемого мотора. Опять же — это отдельная статья. Мы также сделаем таблицу для различных драйверов и моторов. Ну, и последнее, что осталось сделать — при необходимости прописать выбранный драйвер в прошивке.
На сегодня всё, следите за обновлениями нашего блога.
С Уважением, Мастерская робототехники Human & Gears
Особенности и преимущества цифровых драйверов шаговых двигателей
В этой статье на примере цифровых драйверов Leadshine рассматриваются особенности цифровых драйверов шаговых двигателей, их функции и преимущества, в сравнении с обычными драйверами.
В отличие от обычных драйверов, имеющих на борту простой микроконтроллер, или вовсе без такового, цифровые драйвера имеют полноценный цифровой сигнальный процессор, обеспечивающий широкий набор функций управления, настроек и контроля.
Рис. 1. Цифровой драйвер Leadshine DM556.
Преимущества цифровых драйверов Leadshine над обычными драйверами:
- Набор функций для борьбы с резонансом;
- Автоматическое определение параметров подключенного двигателя, и выставление оптимальных настроек для него;
- Микрошаг до 102400 имп/об;
- Автоматическое регулировании тока удержания;
- ПИ-регулятор для контроля тока обмоток;
- Максимальная входная частота до 200кГц;
- Поддержка режимов работы PUL/DIR и CW/CCW;
- Возможность тонкой настройки с персонального компьютера;
- Возможность тестирования работы двигателя в отсутствие внешнего источника импульсов, благодаря встроенному генератору.
Рассмотрим подробнее особенности цифровых драйверов, и возможности их использования в реальных ситуациях.
При подключении нового двигателя к цифровому драйверу, последний автоматически определяет параметры двигателя, устанавливая необходимый максимальный рабочий ток. Эта функция очень полезна в тех случаях, когда под рукой нет спецификаций на подключаемый двигатель, и его рабочий ток неизвестен. Однако, выставить максимальный ток двигателя можно и принудительно, с помощью переключателей на драйвере, либо конфигурированием с компьютера посредством программы ProTuner. Выбор режима конфигурирования тока (переключатели или компьютер) осуществляется переключателями SW1, SW2, SW3. Когда эти переключатели находятся в положении «OFF», «работают» настройки, выставленные с компьютера. Иное их положение задает максимальный ток двигателя в зависимости от того, какой переключатель в каком положении находится, при этом настройки с компьютера игнорируются.
Что касается режима микрошага, то конечно же, он не выбирается автоматически. Его конфигурация производится вручную, либо с помощью переключателей, либо с компьютера через программу ProTuner. Алгоритм аналогичен установкам тока. Переключатели SW5 – SW8, в установленном положении «ON», определяют конфигурирование с компьютера; любое иное положение этих переключателей задает микрошаг в соответствии с тем, какой переключатель в каком положении находится, при этом настройки с компьютера игнорируются.
Вообще, конфигурирование тока и микрошага с помощью компьютера оказывается очень удобным в тех случаях, когда физический доступ пользователя к драйверу ограничен.
Также компьютер дает возможность провести тонкую настройку иных параметров, конфигурирование которых в обычных драйверах даже не предусмотрено.
Например настройка коэффициента пропорциональности и постоянной времени интегрирования для встроенного ПИ-регулятора тока. При использовании обычного драйвера, вы не можете быть точно уверены в том, что реальный рабочий ток двигателя соответствует установленному. Он может быть больше установленного – в этом случае происходит избыточный нагрев двигателя, потери мощности, ввиду возросшего сопротивления. Ток может быть также меньше установленного – в этом случае двигатель не будет развивать заявленного крутящего момента. Эти отклонения тока от заданного значения невелики, однако они возможны.
Возможны потому, что большинство обычных драйверов имеют схемотехнику пропорционального регулирования тока. Как известно из теории автоматического регулирования, при использовании только пропорциональной составляющей, неизбежна остаточная неравномерность, при которой реальное значение будет меньше заданного. При достаточно большом коэффициенте пропорциональности, остаточной неравномерности не будет, однако возникнут незатухающие колебания, приводящие к тому, что реальное значение тока будет то больше, то меньше заданного.
Цифровые драйвера Leadshine имеют встроенный пропорционально-интегральный регулятор. Интегральная составляющая позволяет убирать остаточную неравномерность при заданном коэффициенте пропорциональности, исключающем возможность автоколебаний. ProTuner позволяет не только менять эти коэффициенты, но и просматривать реальные значения тока и его отклонения от заданного значения с помощью графиков.
Рис. 2. Постоянная времени интегрирования Ki равна 0, то есть выключена. На графике видно, что при этом реальное значение тока двигателя меньше установленного. Крутящий момент при этом меньше паспортного значения.
Рис. 3. При правильно подобранных настройках регулятора реальное значение тока двигателя равно заданному. Крутящий момент соответствует паспортному значению.
Ещё одной важной возможностью, реализуемой с помощью программы ProTuner, является борьба с резонансом. Как известно, существует три области резонансных частот шагового двигателя, каждая из которых имеет свою природу: низкочастотная, среднечастотная, высокочастотная. Теоретическое определение резонансной частоты любой области является очень трудоемким делом, и, как правило, эти никто не занимается. Работа строится по принципу «авось пронесёт», и если вдруг «не проносит», то уже в этом случае начинают приниматься какие-то меры, например увеличивают момент инерции нагрузки, ставят демпфирующие муфты, и т.д.
ProTuner позволяет выявлять резонансные частоты еще на стадии наладки, и устранять резонанс. Это производится с помощью внутреннего генератора импульсов цифрового драйвера Leadshine.
Рис. 4. В верхней части настройки микрошага, тока и режима работы. В средней части антирезонансные настройки. В нижней части окна производится управления встроенным генератором импульсов.
Двигатель с нагрузкой (именно с рабочей нагрузкой!) подключается к драйверу, далее, как видно из рисунка 4, можно плавно менять частоту генератора, и пройти весь диапазон частоты вращения вала двигателя. При этом можно физически наблюдать, при какой частоте генератора возникает резонанс двигателя, после чего в соответствующей резонансной области пользователь меняет значения «Amp» и «Phase», подбирая их опытным путём, вплоть до устранения резонанса.
Как видим, цифровой драйвер в большинстве случаев оказывается предпочтительнее обычного, несмотря на чуть более высокую цену, так как взамен пользователь получает множество функций, которые невозможны на обычных аналоговых драйверах.