Динамическое (электродинамическое) торможение
Если отключить двигатель от сети переменного тока и подключить его к источнику постоянного тока, то произойдет динамическое торможение. Обмотка статора, при протекании постоянного тока, создаст неподвижное магнитное поле. При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
Рекуперативное (генераторное) торможение
Рекуперативное торможение применяется в основном в качестве подтормаживания перед основным торможением, либо при спуске груза, например в лифтах.
Чтобы наступило рекуперативное торможение, нужно чтобы частота вращения ротора превысила синхронную частоту вращения. В таком случае двигатель начнет отдавать энергию в сеть, то есть станет асинхронным генератором. При этом электромагнитный момент двигателя становится отрицательным, и оказывает тормозной эффект.
Добиться генераторного торможения можно несколькими способами. Например, в двухскоростных двигателях, при переключении с большей скорости на меньшую. При этом ротор вращается по инерции с частотой, выше, чем новая синхронная частота. Возникнет тормозной момент, который уменьшит скорость до новой номинальной.
Допустим, что в начальный момент времени наш двигатель работал на характеристике 1 в точке A, после переключения скорости на более низкую, он перешел на характеристику 2 в точку B, а затем под действием тормозного момента достиг точки С, с меньшей частотой оборотов.
Генераторное торможение можно осуществить, если уменьшать частоту питания двигателя. Это возможно, если двигатель питается от тиристорного преобразователя частоты. При уменьшении частоты напряжения, уменьшается синхронная частота вращения. Частота вращения ротора, который вращается по инерции, снова окажется выше, возникнет тормозной момент, который будет снижать частоту вращения ротора. Таким образом, двигатель можно довести до полной остановки.
Торможение противовключением
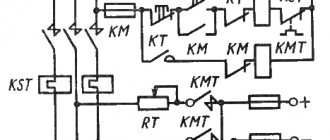
Торможение противовключением применяется для быстрой остановки двигателя. Оно может быть осуществлено несколькими способами. В первом способе, в работающем двигателе, меняют две фазы местами, с помощью выключения контактора K1 и включения K2. При этом направление вращения магнитного поля статора меняется на противоположное. Возникает большой тормозной момент, и двигатель быстро останавливается. Но для того чтобы ограничить большие токи в момент увеличения тормозного момента, необходимо вводить в обмотку статора или ротора дополнительное сопротивление.
Во втором способе двигатель используют как тормоз для груза. То есть, если груз спускается вниз, то двигатель должен работать, наоборот, на подъем. Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
По сути, торможение противовключением осуществляется по схеме реверса двигателя.
Принцип торможения противотоком
Мотор отключается от электросети, и пока ротор продолжает вращаться, вновь подключается противофазой. Такая система создаёт эффективный момент блокировки, обычно превышающий пусковой момент.
Между тем, этот эффективный момент торможения должен быть быстро нивелирован, чтобы двигатель после остановки не вращался в противоположном направлении. Несколько устройств контроля и автоматики привлекаются для обеспечения замедления вращения вала электродвигателя до его полной остановки:
- датчики остановки фрикциона,
- датчики центробежного останова,
- хронометрические приборы,
- реле частоты,
- реле напряжения ротора (для двигателей с фазным ротором) и т. д.
Торможение двигателя с короткозамкнутым ротором
Прежде чем выбирать систему противотока для асинхронного мотора с КЗ ротором, важно обеспечить устойчивость двигателя к противоточному способу с учётом требуемой нагрузки.
Помимо механических напряжений, этот процесс подвергает ротор воздействию высоких тепловых нагрузок, так как энергия, выделяемая при каждой операции, рассеивается в теле ротора.
Тепловое напряжение на противотоке в три раза больше, чем при наборе скорости вращения. Здесь пики тока и крутящего момента заметно выше, если сравнивать с моментом пуска.
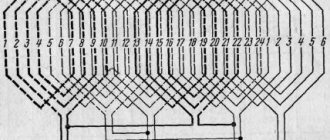
Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и останова
Поэтому для обеспечения плавного останова двигателя системой противотока, как правило, последовательно с каждой фазой статора устанавливают резистор. Благодаря такому добавлению, при переключении уменьшается крутящий момент и ток, до значений, равных тем, что отмечаются на статоре в режиме пуска.
Торможение при самовозбуждении
Если питание двигателя отключить, то его магнитное поле затухнет только через небольшой промежуток времени. Если в этот момент подключить к статорной обмотке двигателя батарею конденсаторов, то энергия магнитного поля будет переходит сначала в заряд конденсаторов, а затем снова возвращаться в обмотку статора. При этом возникнет тормозной момент, который остановит двигатель. Такое торможение часто называют конденсаторным.
Величина тормозного момента будет зависеть от емкости конденсаторов, чем больше емкость, тем больше момент
Конденсаторы могут быть включены постоянно, а могут отключаться во время работы двигателя с помощью контактора.
Можно обойтись и без конденсаторов, просто замкнув с помощью ключей SA, обмотку статора по схеме “звезда”, предварительно отключив ее от сети с помощью контактора K. Тогда торможение произойдет значительно быстрее, за счет остаточного магнетизма двигателя. Такое торможение еще называется магнитным торможением.
Торможение самовозбуждением
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.
Источник
Подписка на рассылку
Производственные процессы, связанные с эксплуатацией оборудования, оснащенного электрическими двигателями переменного или постоянного тока, требуют периодической остановки. Однако после отключения питающего напряжения от электродвигателей, их роторы продолжают вращение по инерции и останавливаются только через определенный промежуток времени. Такая остановка электродвигателя называется свободным выбегом.
Для электродвигателей, работающих с частыми пусками-остановами, остановка способом свободного выбега не подходит. Чтобы сократить время, необходимое для полной остановки вращения ротора применяется принудительное торможение. Способы торможения электродвигателя подразделяются на механические и электрические.
Механическое торможение
Остановка двигателей при таком способе торможения осуществляется благодаря специальным колодкам на тормозном шкиве. После отключения питающего напряжения тормозные колодки под воздействием пружин прижимаются к шкиву. В результате возникающего трения колодок о шкив кинетическая энергия вращающегося вала преобразуется в тепловую, что и приводит к его полной остановке. После подачи напряжения электромагнит (YB) растормаживает колодки, и эксплуатация электродвигателя продолжается в штатном режиме.
В зависимости от схемы электрического торможения, кинетическая энергия вращающегося ротора может отдаваться в сеть или на батарею конденсаторов, а также преобразовываться в тепло, которое поглощается обмотками электродвигателя или специальными реостатами.
Динамическое торможение электродвигателя
Эта схема остановки подходит для трехфазных электродвигателей как с которкозамкнутым, так и с фазным ротором.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется посредством отключения обмоток статора от питающей сети трехфазного переменного тока и переключением двух из них через систему контакторов и реле на источник выпрямленного постоянного напряжения.
Обмотки статора после подачи на них постоянного напряжения генерируют стационарное магнитное поле, под воздействием которого в короткозамкнутой «беличьей клетке»
вращающегося ротора начинает индуцироваться электрический ток, вызывающий появление томозного момента. Направление этого момента противоположно направлению вращения останавливающегося вала. После остановки двигателя подача постоянного напряжения на обмотки статора прекращается.
В двигателях с фазным ротором величину тормозного момента можно регулировать с помощью дополнительных сопротивлений, в качестве которых используются пусковые резисторы.
Торможение противовключением
Торможение асинхронного электродвигателя методом противовключения осуществляется путем реверсирования двигателя без отключения от питающей сети.
Управление торможением выполняется реле контроля скорости. В рабочем режиме контакты реле замкнуты. После нажатия на кнопку «СТОП» (SBC) группа контакторов производит переключение двух фаз, меняя порядок их чередования. В результате этого магнитное поле статора начинает вращаться в противоположном направлении, что приводит к замедлению вращения ротора. Когда скорость вращения становится близкой к нулю, реле контроля скорости размыкает контакты и подача питающего напряжения прекращается.
Конденсаторное торможение электродвигателей
Этот способ, называемый еще торможение с самовозбуждением, применим только к электродвигателям с короткозамкнутым ротором.
После прекращения подачи питающего напряжения ротор электродвигателя продолжает вращение по инерции и генерирует в обмотках статора электрический ток, который вначале заряжает батарею конденсаторов, а после накопления номинального заряда возвращается в обмотки. Это приводит к возникновению тормозного момента, величина которого зависти от емкости конденсаторных батарей, подключенных к каждой фазе по схеме «звезда» или «треугольник». Торможение с самовозбуждением применяется на двигателях с большим числом пусков-остановов, так как величина потерь энергии в двигателях при такой схеме остановки минимальная.
Рекуперативное торможение
Торможение асинхронного электродвигателя в рекуперативном режиме происходит, когда номинальная частота вращения ротора превышает его синхронную частоту. Двигатель начинает генерировать электрическую энергию и отдавать ее в питающую сеть, в результате чего создается тормозящий момент. Такой способ остановки применяется для многоскоростных двигателей путем постепенного переключения с большей частоты вращения ротора на меньшую. Таким образом, в определенный момент скорость, вращающегося под воздействием инерции вала, будет больше синхронной частоты, соответствующей подключенному количеству полюсов статора. Кроме того, рекуперативная схема торможения применяется для двигателей, подключенных к преобразователям частоты. Для этого достаточно уменьшить частоту питающего напряжения.
Остановка двигателей постоянного тока (ДПТ)
Торможение электродвигателей постоянного тока осуществляется противовключением и динамическим способом.
Динамическое торможение
Такая схема торможения применяется для двигателей с независимым возбуждением.
После нажатия кнопки «Стоп» (SB1) происходит отключение обмоток якоря от питающей сети и переподключение их на тормозной резистор. В обмотках якоря, вращающегося по инерции в стационарном магнитном поле, индуцируется постоянный ток, который проходя по обмоточным проводам резистора, преобразовывается в тепловую энергию.
Торможение противовключением Метод противовключения основан на изменении полярности напряжения, подключаемого к обмоткам индуктора или якоря двигателя. Это приводит к смене полярности магнитного потока или направлению тока, индуцируемого в якоре. Таким образом, направление вращающего момента меняется на противоположное, что вызывает появление тормозящего эффекта. Скорость вращения якоря контролируется реле скорости, которое отключает питание якоря, когда она приближается к нулевой.
Торможение поездов с помощью электродвигателей
Здравствуйте!
Что такое электродинамическое торможение на локомотивах и электропоездах? Да помимо пневматических тормозов электровозы и современные тепловозы оборудованы электрическим торможением. А называется оно – реостатное и рекуперативное. Как это торможение работает?
В этой статье рассмотрим электродвигатели постоянного тока. Так как они установлены на большей части электровозов, электропоездов как постоянного, так и переменного тока. Любой электродвигатель имеет якорь с коллектором, имеющим свою обмотку в пазах, который вращается в остове двигателя, а в остове (статоре) расположена еще одна обмотка – обмотка возбуждения. По обмотке якоря и по обмотке возбуждения протекает ток, а как известно вокруг каждого проводника с током образуется магнитное поле, возникает электродвижущая сила – ЭДС. Вот силовые линии магнитных полей якоря и обмотки возбуждения складываются и вращают якорь электродвигателя. Но если обмотку якоря обесточить, а ток в обмотке возбуждения оставить то якорь будет вращаться в магнитном поле обмотки возбуждения — тогда электродвигатель превращается в генератор. В обмотке якоря будет наводится ЭДС. В этом случае возникает электродвижущая сила (магнитный поток), направленная против магнитного потока обмотки возбуждения и соответственно против направления вращения якоря, называется эта сила – противо-ЭДС. Проще говоря, тормозная сила. Сила эта очень большая, вот именно она и играет главную роль в электрическом торможении.
Колесно-моторный блок тепловоза
В общем тяговые электродвигатели (ТЭД) из режима электродвигателя переводятся в режим генераторов, путем отключения обмотки якоря. Ну а для того, чтобы в ТЭД начал вырабатываться электрический ток, необходимо подключить якорь к какой-нибудь нагрузке – тормозным (балластным) сопротивлениям или к контактному проводу.
Тормозные реостаты
Когда подключаются тормозные сопротивления, такое торможение называется – реостатным, а при подключении к контактному проводу – рекуперативным. На электровозах и электропоездах постоянного и переменного тока этот процесс протекает практически одинаково, хотя есть некоторые конструктивные различия.
Все переключения в соответствующие режимы осуществляются с пульта управления контроллером машиниста, через соответствующие электропневматические контакты в силовой цепи локомотива, величина тормозной силы регулируется. Работа данных систем требует серьезной защиты от перегрузок и обязательного соблюдения некоторых условий, например, должно обеспечиваться равенство потоков возбуждения всех ТЭД, что способствует равномерному распределению нагрузок между двигателями при торможении и рельсы должны быть сухими. Также необходимо интенсивно охлаждать тормозные сопротивления.
При рекуперативном торможении ток вырабатываемый ТЭД подается в контактную сеть. На электровозах постоянного тока вырабатываемый ток является постоянным, поэтому сразу может поступать в контактную сеть. А вот с переменным током посложнее, ток на двигателях постоянный, а в контактном проводе переменный. Поэтому рекуперативное торможение на электровозах переменного тока применяется только при наличии выпрямительно-инверторных преобразователей (ВИП). Все современные электровозы переменного тока работатют на таких преобразователях.
При обычном режиме тяги переменный ток проходя через тиристоры в ВИПах преобразуется в постоянный и также, используя свойства тиристров, регулируется. При рекуперативном торможении ток проходит процесс инвертирования, т.е., проходя через тиристоры из постоянного преобразуется в переменный и поступает в контактную сеть. Применение рекуперации дает большой эффект. На отдельных участках с крутыми спусками может быть сэкономлено до 20% электроэнергии.
При любом электрическом торможении на спусках можно обеспечивать постоянную скорость состава, не применяя пневматические тормоза, особенно на затяжных спусках. Частые торможения пневматикой истощают тормозную магистраль, скорость сначала уменьшается, а затем снова растет и необходимо опять применять тормоза, снижается коэффициент трения колодок вследствие их нагревания. Благодаря электрическому торможению значительно уменьшается износ тормозных колодок и колес подвижного состава. В пассажирских поездах обеспечивается плавность хода поезда и комфортность пассажиров, в грузовых исключаются сильные реакции, которые происходят при торможении и отпуске пневматических тормозов. Ну а на электропоездах в пригородном сообщении и в метро электрическое торможение играет главенствующую роль. Также и современные тепловозы оборудуются системами реостатного торможения.
Всего хорошего!
Похожее
Способы торможения асинхронных двигателей
Лекция 18.
Асинхронная машина, подключенная к трехфазной сети, может работать в режимах двигателя (0 1, квадрант IV).
В режиме электромагнитного тормоза направления вращения полей статора и ротора противоположны и режим называют торможением противовключением. Такое торможение достигается изменением направления вращения поля статора. При этом характеристика Е1 заменяется обращенной характеристикой Е2. Для уменьшения токов АД одновременно уменьшают напряжение статора (характеристика И2). Рабочая точка из а
1 по горизонтали скачком переходит в
а
2 и затем по характеристике И2 движется вниз. При достижении точки
а
3 (
n
= 0) АД нужно отключить от сети, иначе начнется реверс. При активном моменте
М
С (груз в подъемнике) возможен второй способ торможения противовключением: в цепь ротора вводится большое сопротивление (характеристика И1) и АД включается на подъем. Под действием преобладающего момента
М
С >
М
п из точки
а
4 начнется спуск груза с подтормаживанием. В точке
а
5 пересечения характеристик И1 и
М
С установится частота спуска –
n
2 (тормозной спуск).
| Характеристики торможения противо- включением |
Рекуперативное торможение возникает, если двигатель переходит в
Этот вид торможения наблюдается в частотно-управляемых двигателях при понижении частоты f
1, а также в многоскоростных двигателях при переходе на низкую скорость.
Например, при увеличении числа пар полюсов характеристика Е1 заменяется на Е2, при этом рабочая точка а
1 по горизонтали скачком переходит в точке
а
2 и далее по характеристике Е2 плавно в точке
а
3,
а
4. Участок
а
2
а
3 является генераторным. Ему соответствует торможение (
Мn
1, т. е. переходит в генераторный режим, при этом кинетическая энергия груза преобразуется в электрическую энергию и отдается в сеть.
Динамическое торможение осуществляют отключением обмоток статора от трехфазной сети и подключением к источнику постоянного напряжения U
(рисунок
а
). Постоянный ток
I
обмоток статора создает неподвижное магнитное поле, под действием которого в обмотке вращающегося по инерции ротора индуцируются токи, создающие тормозной момент. Искусственные механические характеристики в режиме динамического торможения (рисунок
б
) можно регулировать изменением сопротивлений
R
или
R
д в цепи ротора (кривая
1
). Кривая
2
соответствует двигателю с короткозамкнутым ротором.
Динамическое торможение: а
– схема;
б
– характеристики
|
Характеристика n
(
Р
2) по форме близка к механической характеристике
n
(
М
) и является жесткой. Характеристика
М
(
Р
2) близка к линейной, поскольку
n
и Ω изменяются мало. Зависимость
I
1(
Р
2) начинается с точки
I
холостого хода, который для АД составляет (0,25¸0,35)
I
1ном. Мощность всех потерь в АД складывается из мощности постоянных потерь (механические и потери из-за вихревых токов и гистерезиса) и мощности переменных потерь (нагрев обмоток статора и ротора). КПД η достигает максимума при равенстве постоянных и переменных потерь. У АД это условие выполняется при наиболее вероятной нагрузке, т. е. при
Р
2 = (0,6¸0,7)
Р
2ном. КПД микромашин составляет 0,4¸0,6, машин малой и средней мощности – 0,7¸0,9, мощных машин – 0,9¸0,95. Коэффициент мощности cosφ1 на холостом ходе низок (не более 0,2). С ростом нагрузки он растет и достигает максимума при
Р
2 »
Р
2ном. Для двигателей малой и средней мощности при полной загрузке cosφ1 = 0,7¸0,9, при
Р
2 > 100 кВт cosφ1 = 0,9¸0,95. Значениям cosφ1 = 0,7¸0,9 соответствуют значения sinφ1 = 0,7¸0,3, т. е. даже при полной загрузке доля реактивного тока статора составляет 70–30%. При неполной загрузке АД cosφ1 существенно снижается, а в режимах, близких к холостому ходу, АД загружает сеть в основном реактивным током. Поэтому полная загруженность АД – необходимая мера по повышению cosφ промышленных предприятий.
Источник
Рекомендуемые файлы
Техническое задание
Инженерия требований и спецификация программного обеспечения
FREE
Маран Программная инженерия
Программаня инженерия
FREE
Сухов А.В., Парыгин К.Э. — Топлива жидкостных ракетных двигателей
Топлива и теория рабочих процессов в ЖРД
FREE
160700 (24.05.02).С1 Проектирование электроракетных двигателей
Вспомогательные материалы для первокурсников
FREE
Барановский Ю.В. (1972) Режимы резания металлов. Справочник
Технологические основы автоматизации процессов и производств
FREE
Испытания авиационных воздушно-реактивных двигателей Г.М. Горбунов Э.Л. Солохин
ВРД, ЖРД, Газовые турбины
т.е. .
В двигательном режиме S>0 и составляющие и — положительны, причём — индуктивный ток.
В генераторном режиме S<0. При этом не меняет свой знак, а ток меняет знак (φ2=1800). Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратную сторону. При этом изменяется и знак ЭДС .
Двигатель переходит в генераторный режим. Электромагнитный момент также меняет свой знак и он становится тормозным. Следовательно, двигатель работает уже генератором параллельно с сетью, и отдает электрическую энергию, потребляя при этом реактивную мощность для возбуждения. Следует заметить, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную энергию из сети, т.е. генераторный режим возможен только при наличии сети, которая способна снабжать асинхронный генератор реактивной мощностью, необходимой для создания магнитного поля.
Часто характеристики, соответствующие генераторному скольжению, будут располагаться во втором квадрате (II). Поэтому данному режиму будут соответствовать значения скольжения от “0” до “-”. В этом режиме, как видно из формулы для критического момента, критический момент имеет большую величину, чем в двигательном режиме.
Торможение с рекуперацией энергии в сеть используется в подъемно транспортных устройствах при спуске тяжелых грузов. Под действием опускающегося груза асинхронная машина начинает вращаться со скоростью . При этом машина переходит в генераторный режим и начинает создавать тормозной момент. Установившемуся равновесному состоянию будет соответствовать точка пересечения механической характеристики двигателя и линии статического момента. При этом устанавливается равенство М>Мс и груз будет спускаться с установившейся скоростью.
Для этого, чтобы обеспечить нормальный тормозной спуск груза статический момент не должен превосходить критического момента машины в генераторном режиме.
Если на валу механизма имеется реактивный
, статический момент, то торможение с рекуперацией энергии в сеть возможно только в случае использование асинхронного двигателя с переключением числа пар полюсов.
Предположим, что обмотки статора включены таким образом, что они обеспечивают меньшее число пар полюсов, т.е. двигатель работает в точка А, на высшей скорости
Если обмотки переключить на меньшее число пар полюсов p2, то двигатель перейдёт работать в точку В на характеристику 2, проходящую через точку
Скорость вращения двигателя при переключении окажется больше синхронной скорости, соответствующей новому числу полюсов, т.е.
.
Машина перейдет в режим генератора. На рис. 4.10 область с отдачей энергии в сеть соответствует участку ВСД механической характеристики.
Этот процесс применяется (имеет место) например в приводах металлорежущих станков при переключении скоростей двигателя.
Что такое динамическое торможение?
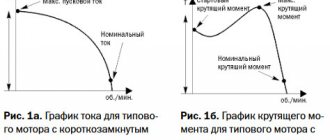
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Рекуперативное торможение
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Трёхфазные асинхронные двигатели: методы торможения хода
Главная страница » Трёхфазные асинхронные двигатели: методы торможения хода
Значительное число приводных систем используются при естественном замедлении работы двигателей в процессе остановки. Время, затрачиваемое на остановку ротора, измеряется исключительно инерционным моментом и моментом сопротивления вращению. Между тем нередко эксплуатация систем требует сокращать время остановки вала мотора и в этом случае электрическое торможение хода электродвигателя видится простым и эффективным решением. По сравнению устройствами, где применяются механический или гидравлический способы, электрическое торможение двигателей имеет явные преимущества в плане устойчивости действия и экономичности применения.
Торможение противовключением
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.