Какие критерии определяющие для выбора?
Надо помнить о том, что, по сравнению с обычными двигателями, шаговые требуют более сложных схем для управления. А критериев не так уж много.
- Параметр индуктивности.
Первый шаг – определение квадратного корня из индуктивности обмотки. Результат потом умножаем на 32. Значение, полученное в качестве итога, потом требуется сравнивать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны отличаться друг от друга слишком сильно. Мотор будет греться и шуметь слишком сильно, если напряжение питания больше полученного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, крутящий момент убывает. Чем больше индуктивность – тем проще сохранить высокий крутящий момент. Но для этого надо подобрать драйвер, имеющий большое напряжение питания. Только в этом случае шаговой двигатель работает нормально.
- График того, как крутящий момент и скорость зависят друг от друга.
Это позволит понять, насколько двигатель в принципе соответствует запросам и техническому заданию.
- Параметры геометрического плана.
Особое внимание рекомендуется уделить диаметру вала, фланцу и длине двигателя.
Кроме того, следующие показатели так же рекомендуется внимательно изучить:
- Максимальный статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток внутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
CNC-DESIGN
Шаговые двигатели выбор и расчет основных параметров. Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. Вал шагового двигателя вращается с дискретным шагом, когда на него подаются управляющие импульсы в правильной последовательности. Вращение двигателей напрямую зависит от входящих импульсов, так же они напрямую управляют направлением и скоростью вращения вала двигателя.
Преимущества и недостатки шагового двигателя: Преимущества: — угол поворта двигателя пропорционален входным импульсам; — фиксация положения при остановке током удержания; — точное позиционирование и повторяемость движения, так как большинство шаговых двигателей имеют точность 3-5% шага, и эта ошибка не суммируется от одного шага к следующему; — низкая инертность при запуске, остановке и реверсе; — высокая надежность, поскольку в двигателе отсутствуют контактные щетки, поэтому срок службы двигателя в основном зависит от срока службы подшипников; — реакция двигателя на цифровые входные импульсы обеспечивает управление без обратной связи, что делает систему более простой и, следовательно, более экономичной; — можно достичь очень низкой скорости синхронного вращения с нагрузкой, которая напрямую связана с валом; — можно реализовать широкий диапазон скоростей вращения, так как скорость пропорциональна частоте входных импульсов; — шаговые двигатели дешевле серводвигателей.
Недостатки: — может возникнуть явление резонанса, при некорректном расчете узла или системы управления; — двигатель непрост вэксплуатации наочень высоких скоростях, 3000+ об/мин; — сложность системы управления; — падение мощности с ростом скорости вращения; — отсутствие обратной связи; — невысокая удельная мощность; — низкая скорость вращения; — шум.
Выбор шагового двигателя. Шаговый двигатель можно использовать когда требуется контролируемое движение. Они могут использоваться в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизацию. Из-за присущих выше преимуществ, шаговые двигатели нашли свое место в различных устройствах: принтеры, плоттеры, лазерные резаки, гравировальные станки, устройства захвата и так далее. При выборе шагового двигателя для вашего устройства необходимо учитывать несколько факторов: Как двигатель будет связан с нагрузкой? Какие скорость и ускорения необходимо реализовать? Какой крутящий момент необходим для перемещения исполнительного механизма? Какая степень точности требуется при позиционировании?
Количество полюсов (однополюсный/биполярный) Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели. Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а однополярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют четырехфазным двигателем, хотя он имеет только две фазы. Двигатели с двумя отдельными обмотками на фазу могут приводиться в двухполярный или однополярный режим. Желательно, чтобы количество проводов на двигателе соответствовало количеству контактов на драйвере, чтобы не заниматься различными ухищрениями при подключения.
Номинальный ток Обычно указывается максимальный ток, который подается одновременно на обе обмотки. Максимальный ток через одну обмотку (который действительно имеет значение при использовании микрошагов) указывается достаточно редко. При подаче номинального тока на одну обмотку происходит нагрев двигателя, из-за этого обычно ограничивают ток двигателя не более 85% от номинального тока. Для достижения максимального крутящего момента двигателя без перегрева, необходимо выбрать двигатель с номинальным током не более чем на 25% выше, чем рекомендуемый максимальный ток привода шагового двигателя.
Крутящий момент Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, теплоотвода, рабочего цикла, обмотки двигателя и типа используемого привода. Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек собственных колебаний резонанса могут быть обнаружены либо по звуку, либо по датчикам вибрации. Полезный крутящий момент от шагового двигателя может быть резко уменьшен за счет резонансов. Работы на резонансных частотах следует избегать. Внешнее демпфирование, дополнительная инерция или применение микрошагов используются для уменьшения эффекта резонанса.
Удерживающий момент Это максимальный крутящий момент, который может обеспечить двигатель, когда обе обмотки находятся под напряжением при полном токе. Крутящий момент пропорционален току (за исключением очень малых токов), поэтому, например, если вы установите драйверы на 85% от номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% от указанного удерживающего момента. Крутящий момент возникает, когда угол ротора отличается от идеального угла, который соответствует току в его обмотках. Когда шаговый двигатель ускоряется, возникает крутящий момент для преодоления собственной инерции ротора и массы нагрузки, приводимой в движении. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла. Известно, что использование микрошага снижает крутящий момент. На самом деле это означает, что угол запаздывания равен углу, соответствующему одному микрошагу (поскольку вы хотите, чтобы положение было с точностью до одного микрошага), более высокое значение микрошага предполагает уменьшение угла, а значит и уменьшение крутящего момента. Крутящий момент на единицу угла (что действительно имеет значение) не уменьшается при увеличении микрошага. Иными словами, отправка импульса на двигатель на один микрошаг 1/16 приводит к точно таким же фазовым токам (и, следовательно, к тем же силам), что и к отправке двух 1/32 микрошагов или четырех 1/64 микрошагов и так далее.
Размер Шаговые двигатели также классифицируются в соответствии с размерами корпуса, которые соответствуют размеру рамы двигателя. Например, шаговый двигатель NEMA11 имеет размер рамы приблизительно 1,1 дюйма (28 мм). Аналогично, шаговый двигатель NEMA23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может изменяться от двигателя к двигателю в рамках одной и той же классификации размеров, при этом крутящий момент двигателя с определенным размером рамы будет увеличиваться с увеличением длины корпуса.
NEMA8:
— габарит рамы 20х20 мм; — диапазон длин: 30-42 мм; — крутящий момент: 0,18-0,3 кг*см.
NEMA11
— габарит рамы 28х28 мм; — диапазон длин: 32-51 мм; — крутящий момент: 0,43-0,9 кг*см.
NEMA14
— габарит рамы 35х35 мм; — диапазон длин: 28 мм; — крутящий момент: 1,0 кг*см.
NEMA16
— габарит рамы 39х39 мм; — диапазон длин: 20-38 мм; — крутящий момент: 0,65-2,0 кг*см.
NEMA17
— габарит рамы 42х42 мм; — диапазон длин: 25-60 мм; — крутящий момент: 1,7-6,5 кг*см.
NEMA23
— габарит рамы 56х56 мм; — диапазон длин: 41-76 мм; — крутящий момент: 2,88-18,9 кг*см.
NEMA34
— габарит рамы 86х86 мм; — диапазон длин: 65-156мм; — крутящий момент: 34-122 кг*см.
NEMA43
— габарит рамы 110х110 мм; — диапазон длин: 99-201 мм; — крутящий момент: 112-280 кг*см.
NEMA51
— габарит рамы 130х130 мм; — диапазон длин: 165-270 мм; — крутящий момент: 270-500 кг*см.
Угол шага. Существует два распространенных угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам/оборот. Большинство устройств используют двигатели с шагом 1,8 град/шаг. При заданной скорости вращения 0,9-градусный двигатель производит вдвое больше индуктивной обратной эдс, чем 1,8-градусный двигатель, из-за этого возможно будет необходимо использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса. Для двигателей 0,9 градуса необходимо подавать шаговые импульсы драйвера с удвоенной скоростью по сравнению с двигателями 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать шаговые импульсы.
Разрешение и точность позиционирования. На разрешение и точность позиционирования системы шагового двигателя влияют несколько факторов: угол шага (длина полного шага шагового двигателя), выбранный режим движения (полный шаг, полшага или микрошаг) и скорость передачи. Это означает, что есть несколько различных комбинаций, которые можно использовать для получения желаемого разрешения, из-за этого проблема разрешения обычно может быть решена после того, как были определены размер двигателя и тип привода.
Самоиндукция . Индуктивность двигателя влияет на скорость, с которой драйвер шагового двигателя может приводить двигатель в действие до падения крутящего момента. Если мы временно игнорируем обратную эдс из-за вращения, а номинальное напряжение двигателя намного меньше, чем напряжение питания привода, то максимальные обороты в секунду перед падением крутящего момента составляют:
оборотов_в_секунду=(2*напржение_БП)/(шагов_на оборот*3,14* индуктивность* ток)
Если двигатель приводит ремень GT2 через шкив, это дает максимальную скорость в мм/с как:
скорость=(4*кол-во_зубьев_шкива*напряжение_БП)/(шагов_на_оборот*3,14* индуктивность*ток)
Например: двигатель 1,8 град/шаг ( т. е. 200 шагов/об) с индуктивностью 4 мГн работает при 1,5, А при напряжении питания 12 В, и привод ремня GT2 с 20-зубчатым шкивом начинает терять крутящий момент со скоростью около 250 мм/с. На практике крутящий момент начинает падать раньше, чем это из-за обратной эдс, вызванной движением, потому что не учитывается сопротивление обмоток. Моторы с низкой индуктивностью также имеют низкую ЭДС из-за вращения. Для достижения высоких скоростей, необходимо выбирать двигатели с низкой индуктивностью и высоким напряжением питания.
Сопротивление и номинальное напряжение Это сопротивление на фазу и падение напряжения на каждой фазе, когда двигатель неподвижен, и фаза передает свой номинальный ток (который является результатом сопротивления и номинального тока). Это важно когда номинальное напряжение значительно ниже напряжения питания для шаговых драйверов.
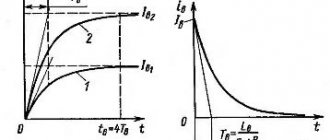
Обратный ЭДС из-за вращения Когда шаговый двигатель вращается, то создается обратная эдс. При идеальном нулевом угле запаздывания на 90 градусов не в фазе с напряжением возбуждения, а в фазе с обратной ЭДС из-за индуктивности. Когда двигатель выдает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током. Обратный ЭДС из-за поворота обычно не указывается в спецификации, но мы можем оценить его по следующей формуле:
ЭДС= 1,414*3,14*момент_удержания*оборотов_в_секунду/номинальный_ток
Формула предполагает, что удерживающий момент указан для обеих фаз, находящихся под напряжением при номинальном токе. Если это указано только с одной фазой под напряжением, замените 1,414 на 2. Пример: рассмотрим 200-шаговый двигатель, приводящий каретку через шкив с 20 зубцами и ремень GT2. Это 40-миллиметровое движение за оборот. Для достижения скорости 200 мм/сек нам нужно 5 об/сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают при 1,68, А, пиковая обратная эдс из-за вращения составляет
1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Как вбрать необходимое напряжение питания Если заранее известна необходимая скорость движения для вашего устройства, можно предварительно определить, какое напряжение питания вам потребуется для драйверов двигателя. Пример: определим необходимую скорость движения. Для этого примера будем использовать 200 мм/сек, передача шкив 20 зубьев GT2. Исходя из необходимой скорости движения, определим максимальную скорость ремня. Прикинем обратную ЭДС от индуктивности:
напряжение=шагов_в_сек*3,14*ток_двигателя*ЭДС_двигателя*N/2
где N — число полных шагов на оборот (200 для двигателей с 1,8 градусами или 400 для двигателей с 0,9 градусами). Возьмем для примера двигателя со следующими параметрами: 0,9 градуса с индуктивностью 4,1 мГн, и токе 1А. Таким образом, обратная эдс из-за индуктивности составляет:
5*3,142*1,0*4,1e-3*400/2 = 12,87 В
Вычислим обратную ЭДС из-за вращения по приведенной ранее формуле. Двигатели для примера имеют номинальный ток 1,68А и момент удержания 0,44 Нм, поэтому результат равен:
1,414*3,142*0,44*8,7/1,68 = 10,1 В
Предпочтительно, чтобы напряжение питания драйвера составляло по меньшей мере сумму этих двух обратных эдс, плюс еще несколько вольт запаса. При использовании двух двигателей последовательно требуемое напряжение удваивается.
Алгоритм выбора шагового двигателя 1. Определение компонента механизма привода . Определите механизм и необходимые входные данные, вариант механизма, приблизительные размеры, расстояния перемещения и время позиционирования. 2. Рассчитайте необходимое разрешение. Найдите разрешение, необходимое для двигателя. Исходя из требуемого разрешения, определите, будет ли использоваться только двигатель или мотор-редуктор . Тем не менее, благодаря использованию технологии микрошагов, достичь требуемого разрешения стало гораздо легче. 3. Определите схему работы Определите схему работы, которая соответствует требуемым данных. Рассчитайте значения ускорения (замедления) и скорость рабочего импульса, чтобы рассчитать момент ускорения. 4. Рассчитайте необходимый крутящий момент. Рассчитайте момент нагрузки и момент ускорения и найдите требуемый момент, требуемый двигателем. 5. Выберите двигатель. Сделайте предварительный выбор двигателя на основе требуемого крутящего момента. Определите используемый двигатель по характеристикам скорости и крутящего момента. 6. Проверьте выбранный двигатель. Подтвердите скорость ускорения / замедления и коэффициент инерции.
Общие рекомендации: — если не планируется использовать внешние драйверы шаговых двигателей, выбирайте двигатели с номинальным током не менее 1,2, А и не более 2,0 А. — рассчитывайте на рабочий ток шагового двигателя 50-85% от номинального. — размер: Nema 17- самый популярный размер, используемый в домашних проектах. Nema 23 необходимо использовать если не хватает крутящего момента от длинных двигателей Nema 17. — старайтесь не использовать двигатели с номинальным напряжением (или произведением номинального тока и фазового сопротивления)> 4 В или индуктивности> 4 мГн. — выборйте двигатель с 0,9 град/шаг, если необходима дополнительная точность позиционирования, для стандартных решений используйте двигатели 1,8 град/шаг. — при использовании 0,9 градусных шаговых двигателей или двигателей с высоким крутящим моментом, необходимо применение блоков питания с напряжением 24 В, чтобы поддерживать крутящий момент на более высоких скоростях.
О разновидностях двигателей
Для станка используемая разновидность шаговых двигателей – параметр не менее важный, чем остальные. Каждая модель наделена своими особенностями.
- Биполярные чаще всего применяются совместно с ЧПУ.
Главное достоинство – возможность легко выбрать новый драйвер, если старый выходит из строя. На малых оборотах при этом сохраняется высокое удельное сопротивление.
- Трёхфазные.
Для них характерна высокая скорость. Актуальны, если именно данному параметру уделяют больше всего внимания в случае выбора.
- Униполярные.
Это несколько видов биполярных двигателей, которые отличаются друг от друга и подбираются в зависимости от подключения обмотки.
Обзор шаговых двигателей
В мире разработчиков шаговые двигатели широко распространены в технологии 3D печати. Все потребительские 3D принтеры оснащены ими. Шаговые двигатели также широко используются и в робототехнике.
Шаговые двигатели широко используются в робототехнике и 3D принтерах
Шаговые двигатели часто сравнивают с серводвигателями, поскольку эти оба типа двигателей используются в системах, требующих высокого уровня точности позиционирования.
Однако способы, которыми каждый тип двигателя отслеживает свое положение, сильно отличаются. Как обсуждалось в предыдущей статье, серводвигатель содержит в себе потенциометр, который измеряет абсолютное положение двигателя. Поэтому в любой момент времени сервопривод точно знает, как расположен вал двигателя. Шаговый двигатель не измеряет угол своего вала.
По поводу резонанса при средних частотах
Шаговые двигатели связаны с возникновением сильного резонанса. По сути, они работают, как маятник с подвешенным на пружине грузиком. Роль груза выполняет ротор, а поле с магнитной энергией – пружина. Собственные колебания имеют частоту, определяемую по двум показателям:
- Инерция ротора.
- Сила тока.
Резонанс появляется, когда разность между скоростью и фазностью момента достигает 180 градусов. Это означает, что присутствует соответствие скорости и изменений внутри магнитного поля. Движение становится быстрым при позиционировании по новому шагу. Крутящий момент падает из-за того, что больше всего энергии уходит, чтобы преодолеть инерцию.
Как работает шаговый двигатель?
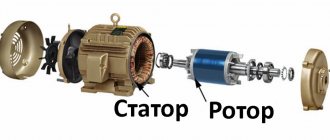
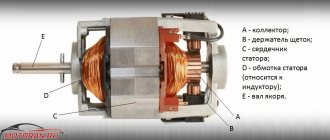
Конструкция шагового двигателя похожа на более сложную версию бесколлекторного двигателя. Вы заметите, что многие детали, по сути, одинаковы, но в шаговом двигателе их конструкция значительно сложнее.
Основные компоненты шагового двигателя
В шаговом двигателе обмотки расположены вокруг внешней части кожуха. Постоянные магниты установлены на валу двигателя. Поскольку эти постоянные магниты достаточно тяжелые, шариковый подшипник с обеих сторон вала двигателя помогает стабилизировать двигатель.
Шаговые двигатели в теории работают аналогично бесколлекторным двигателям. Для создания магнитного поля обмотки возбуждаются и, воздействуя на постоянные магниты, заставляют вал двигателя двигаться.
Ребра на постоянных магнитах соответствуют похожим ребрам на обмотках на корпусе двигателя. Вместо непрерывного вращения шаговые двигатели перемещаются между этими ребрами дискретными шагами.
Различие с бесколлекторным двигателем заключается в том, что вместо того, чтобы каждый раз, когда обмотки переключают полярность, поворачиваться примерно на 30% от окружности, шаговый двигатель поворачивается очень немного, обычно всего на 1,8 градуса. Каждый из этих крошечных поворотов называется шагом. Контроллеры могут также управлять мощностью, подаваемой на обмотки, так, что шаговый двигатель может поворачиваться всего на 0,05625 градуса за шаг. Этот вид чрезвычайно точного управления движением позволяет шаговым двигателям достичь очень высокой точности позиционирования.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
С контроллера ПУ сигналы идут к драйверу. Далее организуется управление процессом, во время которого переключаются ключи, составляющие схему с питающим напряжением. Последнее идёт с блока питания, на двигатель, проходя по ключам.
Типы шаговых приводов
Существует два типа шаговых приводов:
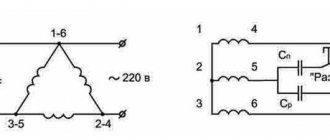
- Униполярные.
Обмотки статора имеют от 5 до 8 выводов. Двигатель включается в работу посредством их коммутации при помощи простейшего драйвера с четырьмя ключами. - Биполярные.
В таком моторе всего 4 вывода, и для изменения параметров магнитного поля им нужна более сложная система управления.
Биполярные двигатели развивают большие моменты на валу, чем униполярные, при сравнимых массово-габаритных характеристиках, поэтому их в станках с ЧПУ можно увидеть значительно чаще.
Что ещё учесть?
Центр-краном называют обычный провод. Ещё для него используют обозначения «. Часть моделей шаговых двигателей снабжаются подобными приспособлениями. Каждая обмотка идёт совместно с тремя проводами, когда речь идёт об униполярных вариантах. Два из них организуют соединение с транзисторами. Центр-кран или средний идёт прямо до источника питания или напряжения.
Два боковых провода вообще можно игнорировать, если транзисторы использовать не планируется.
Пяти- и шестипроводные модели во многом похожи друг на друга. Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.