Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор – это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Виды шаговых двигателей по типу ротора:
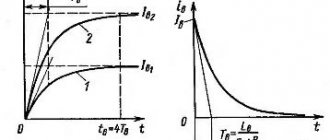
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы.
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А.
Упрощенная схема коммутатора шагового двигателя без реверса. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания. Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса.
Зависимость момента от угла поворота ротора для двух запитанных обмоток. Обычно у них четыре вывода, две обмотки.
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.
Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
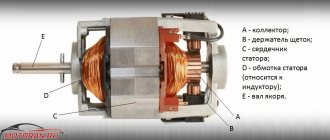
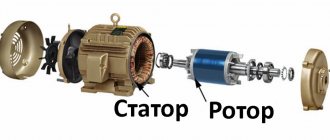
Обеспечивает паспортное значение электрических характеристик. Драйверы делятся на две категории: Повторяющие форму сигналов. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC ON MOSFET, но с учетом рекомендаций, описанных выше. Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса – положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.
Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Подключение шаговых двигателей
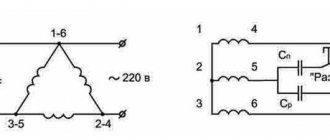
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
Начнем с того, что покажем как подключить шаговый двигатель с 4 выводами. Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода и подключите их к шаговому двигателю.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
| Шаговый двигатель Nema17 42BYGH 1.7A (17HS4401-S) для 3D принтера | Набор из 5 шаговых двигателей ULN2003 28BYJ-48 с платам драйверов для Ардуино | Шаговый двигатель с модулем драйвера 5V Stepper Motor 28BYJ-48 + ULN2003 |
| Еще один вариант шагового двигателя для Arduino 28BYJ-48 5V 4 Phase DC Motor + ULN2003 Drive Test Board | Набор из трех шаговых двигателей Nema17 Stepper Motor 42BYGH 1.7A (17HS4401) для 3D приентера | AliExpress.com Product – 3D Printer Parts StepStick A4988 DRV8825 Stepper Motor Driver With Heat sink Carrier Reprap RAMPS 1.4 1.5 1.6 MKS GEN V1.4 board |
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Читать также: Удельный вес свинца г см3
В статье подробно рассказано о нескольких способах обновления BIOS на материнской плате Asus.
Теперь вы точно подберете идеальный ноутбук для работы или учебы!
Данная статья описывает преимущества SSD накопителей для приложений и игр. Также здесь выполняется сравнение между достоинств данного накопителя с устаревшим аналогом.
В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
Шаг 1.
От старого сканера:
- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: – 1 картонная коробка
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
- 1 разъем DB-25 – провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка – разные шайбы и шурупы – куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC ( отсюда)
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.
Шаг 4.
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный – к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 – с выводом 3 ULN2003 и вывод 5 – с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.
Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством – это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку «tcnc». Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.
Шаг 6.
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите «C: cncTURBOCNC». Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно «A: cncTURBOCNC». Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке «Drive Type». При помощи стрелки вниз выберите пункт «Phase». Снова при помощи Tab выберите ячейку «Scale». Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную – 175. Нажимайте Tab пока не дойдете до пункта «Last Phase». Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Читать также: Забить дюбель в бетон
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX 0100XXXXXXXX 0010XXXXXXXX 0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.
Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.
Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
Часть 1
Изготовление корпуса – это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.
Шаг 10.
Изготовление корпуса
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.
Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: – ЧПУ устройство – плоттер – или любую другую вещь, которой нужно точное управление движением. – добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле «number of axis» введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
«XXXX1000XXXX XXXX0100XXXX XXXX0010XXXX XXXX0001XXXX»
Для третьей оси в строках первых четырех фаз введите:
«XXXXXXXX1000 XXXXXXXX0100 XXXXXXXX0010 XXXXXXXX0001»
Перевод: Piyavka, по заказу РадиоЛоцман
| Фрагменты обсуждения (только последние 20 сообщений): | Полный вариант обсуждения » |
- Из серии «станок с ЧПУ своими руками». В принципе информация уже известная, только ПО используется древнее (для экспериментов конечно же подойдет). И на фотке микросхема TD62803 (вроде как аналог).
- програмное обеспеч работает под мс-дос а может етот контролер работать под виндовс хр.
- Если ОС даст общаться напрямую с LPT-портом, то возможно попробовать запустить эту прогу под Windows (c командной строки).
- Понимаю, конечно, что хочется попробовать ШД. Сам несколько лет назад не знал, как подойти к нему. Но желание попробовать – означает применить где-то. Лучше всего для первых опытов подойдёт: ПО- MACH-2 Контроллер на L297 + 4 полевика IRF640 к примеру. ( желательно с драйверами). На входе вашей волшебной конструкции обязательно 2 оптрона. Замкнёшь много не сгорит.Компьютер уцелеет точно. И в добрый путь.
- я спаял контроллер на unl2003 как его теперь проверить перед подключением к компу..
- а без оптронов не как
- Можно, но только для первых опытов. А проверить просто.Возьми и включи заместо обмоток лампочки накаливания. И всё увидишь на медленной скорости.
- ето в место оптронов поставить лампочки.
- До оптронов ещё как до Луны. Вместо обмоток – Лампочки.
- а у вас нет простинькой схемы контролера.
- По-моему это и есть самая простая схема, куда еще проще, тем более, что Вы ее уже собрали. Осталось проверить, по этому драйверу ULN2003 много информации
- схема работает но только 2 двигателя. на 3 двигатели который подключен к 1,14,16,17. неработает 1 вход почему .и немогу разобратся в програме turbo cnc.есть ли такая только на руском языке.
- Драйвер ULN2003, подключенный к этим выходам, исправен? настройку сделали как в сатье описано?
- помогите разобратся с програмой turbo cnc.а нет ли другой програмы на руском для контроллера на uln2003.
- Вот здесь есть и программа под Win и много полезной информации касаемо шаговых двигателей
- делаю второй контролер на 555тм7 и uln2004 .но есть одна проблема по схеме стоит uln2004 а возможна ли замена на uln2003.если возможна то в чем их разница.
- Микросхемы взаимозаменяемы, единственное отличие: ULN2003 может управляться ТТЛ и КМОП сигналами, а ULN2004 – только КМОП (6-15 В). По-моему так, если память не изменяет мне. А лучше скачать на них даташит и сравнить.
- Здравствуйте ! Помогите, кто может! Как управлять одним компьютером или контролером одновременно сотней шаговых двигателей?
- не слишком ли много шаговых двигателей на один «мозг». Как вариант – использовать расширитель портов для микроконтроллера и драйверы шаговых двигателей, или специальные драйверы шаговых двигателей с последовательным интерфейсом и адресацией.
- А можно ли подключить шаговый двигатель к указаннои схеме если у него не 5 а 4 выхода (M49SP-2NK) И ЕСЛИ ДА ТО КАК
Читать также: Для чего используется стусло
| Полный вариант обсуждения » |
| Рекомендуемые публикации по теме: |
| Схемы | » |
При перепечатке материалов с сайта прямая
ссылка на РадиоЛоцман обязательна.
Приглашаем авторов статей и переводов к публикации материалов на страницах сайта.
Запуск шагового двигателя без электроники
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
Для эксперимента использовался вот такой шаговый двигатель:
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.
Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.
Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов — их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.
И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Читать также: Ограничитель для сверления отверстий под эксцентриковую стяжку
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.