Электромагнитная мощность и момент, угловые характеристики синхронных генераторов
Поле якорной обмотки статора 1
имеет полюса
Nя
и
Sя
. Вращающееся вместе с ротором поле
2
обмотки возбуждения, имеет полюса
N
и
S.
В установившемся синхронном режиме поля обмотки якоря и обмотки возбуждениявращаются с синхронной скоростью
n1.
Полюсные системы обмоток якоря и обмотки возбуждения неподвижны относительно друг друга. Между ними происходит постоянное взаимодействие и возникает электромагнитная сила
F
, стремящаяся ориентировать ротор таким образом, чтобы поля обмоток якорной и возбуждения были направлены согласно.
Силы, возникающие при этом, можно моделировать, используя стремящиеся сократиться резиновые нити 3,
натянутые между разноименными полюсами систем якоря и обмотки возбуждения
.
Если машина не имеет нагрузки, то разноименные полюса систем якоря и обмотки возбужденияустанавливаются напротив друг друга по одной оси и электромагнитный момент отсутствует. Электромагнитная сила
F,
действующая между полюсами, имеет радиальное направление.
В генераторном режиме приводной двигатель или турбина создают вращающий момент на валу. Вал генератора вместе с полем ротора поворачивается и опережает поле якорной обмотки на угол Θ
. Вследствие этого электромагнитные силы
F
притяжения полей ротора и статора имеют тангенциальные составляющие
Fτ,
создающие тормозной электромагнитный момент. С увеличением нагрузки генератора угол
Θ
увеличивается, т. е. поле статора в большей степени отстает от поля ротора. При увеличении угла
Θ
в некоторых пределах увеличиваются
Fτ
и электромагнитный момент генератора. Максимум момента соответствует значению
Θ
= 90°, когда ось полюсов ротора расположена между осями полюсов суммарного потока.
Если машина переходит в двигательный режим, то на вал действует внешний момент, притормаживающий ротор. Вследствие этого вал двигателя вместе с полем ротора поворачивается и отстает от поля статора на угол Θ.
В этом случае тангенциальные составляющие электромагнитных сил меняют направление и возникает вращающий электромагнитный момент двигателя. Таким образом, при переходе из генераторного режима в двигательный установившаяся скорость вращения машины не меняется, а меняется знак угла
Θ.
В статоре синхронного генератора имеют место электрические потери в обмотке якоря Рэя
и потери в стали сердечника.
Электромагнитная мощность, передаваемая от ротора к статору электромагнитным полем равна:
В синхронных машинах большой и средней мощности потери в обмотке якоря Рэя
и потери в стали сердечника
Рс
малы по сравнению с электрической мощностьюотдаваемой генератором сеть. Если ими пренебречь, то электромагнитная мощность будет равна полезной мощности
Р2
, отдаваемой генератором в сеть:
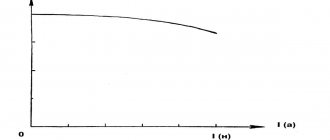
Угловые характеристики синхронного генератора
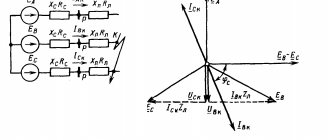
Электромагнитная мощность неявнополюсного синхронного генератора при его параллельной работе с сетью
где θ — угол, на который продольная ось ротора смещена относительно продольной оси результирующего поля машины (рис. 21.4).
Электромагнитная мощность явнополюсного синхронного генератора
где xd=xad+x1 и xq= xad+x1 — синхронные индуктивные сопротивления явнополюсной синхронной машины по продольной и поперечной осям соответственно, Ом.
Разделив выражения (21.7) и (21.8) на синхронную частоту вращения ω1,получим выражения электромагнитных моментов:
неявнополюсной синхронной машины
явнополюсной синхронной машины
где М — элёктромагнитный момент, Н*м.
Анализ выражения (21.10) показывает, что электромагнитный момент явнополюсной машины имеет две составляющие: одна из них представляет собой основную составляющую электромагнитного момента
другая — реактивную составляющую момента
Основная составляющая электромагнитного момента Мосн явнополюсной синхронной машины зависит не только от напряжения сети (Мосн ≡ U1), но и от ЭДС Е, наведенной магнитным потоком вращающегося ротора Ф в обмотке статора:
Это свидетельствует о том, что основная составляющая электромагнитного момента Мосн зависит от магнитного потока ротора: Мосн ≡ Ф. Отсюда следует, что в машине с невозбужденным ротором (Ф = 0) основная составляющая момента Мосн = 0.
Реактивная составляющая электромагнитного момента Мр не зависит от магнитного потока полюсов ротора. Для возникновения этой составляющей достаточно двух условий: во-первых, чтобы ротор машины имел явно выраженные полюсы (xq ≠ xd) и, во-вторых, чтобы к обмотке статора было подведено напряжение сети (Мр =U1 2 ). Подробнее физическая сущность реактивного момента будет изложена в § 23.2.
При увеличении нагрузки синхронного генератора, т. е. с ростом тока I1 происходит увеличение угла θ, что ведет к изменению электромагнитной мощности генератора и его электромагнитного момента. Зависимости Рэм = f
(θ) и M =
f
(θ), представленные графически, называются, угловыми характеристиками синхронной машины.
Рассмотрим угловые характеристики электромагнитной мощности Рэм.я = f
(θ) и электромагнитного момента Mя =
f
(θ) явно- полюсного синхронного генератора (рис. 21.5). Эти характеристики построены при условии постоянства напряжения сети (Uc = const) и магнитного потока возбуждения, т.е. E= const. Из выражений (21.9) и (21.11) видим, что основная составляющая электромагнитного момента Мосн и соответствующая ей составляющая электромагнитной мощности изменяются пропорционально синусу угла θ (график 1), а реактивная составляющая момента Мр и соответствующая ей составляющая электромагнитной мощности изменяется пропорционально синусу угла 2θ (график 2). Зависимость результирующего момента Мя = Мосн + Мр и электромагнитной мощности Рэм от угла θ определяется графиком 3, полученным сложением значений моментов Mосн и Мр и соответствующих им мощностей по ординатам.
Максимальное значение электромагнитного момента Мmax соответствует критическому значению угла θкр.
Рис. 21.5. Угловая характеристика синхронного генератора
Как видно из результирующей угловой характеристики (график 3), при увеличении нагрузки синхронной машины до значений, соответствующих углу θ≤θкр, синхронная машина работает устойчиво. Объясняется это тем, что при θ≤θкр рост нагрузки генератора (увеличение θ) сопровождается увеличением электромагнитного момента. В этом случае любой установившейся нагрузке соответствует равенство вращающего момента первичного двигателя М1 сумме противодействующих моментов, т.е. M1= Mя+ M. В результате частота вращения ротора остается неизменной, равной синхронной частоте вращения.
При нагрузке, соответствующей углу θ≤θкр электромагнитный момент Мя уменьшается, что ведет к нарушению равенства вращающего и противодействующих моментов. При этом избыточная (неуравновешенная) часть вращающего момента первичного двигателя ΔМ = M1 — (Мя + M) вызывает увеличение частоты вращения ротора, что ведет к нарушению условий синхронизации (машина выходит из синхронизма).
Электромагнитный момент, соответствующий критическому значению угла (θкр), является максимальным Мmах.
Для явнополюсных синхронных машин θкр = 60÷80 эл. град.
Угол θкр можно определить из формулы
cos θкр = √β 2 +0,5 – β (21.14)
У неявнополюсных синхронных машин Мр = 0, а поэтому угловая характеристика представляет собой синусоиду и угол θкр = 90°.
Отношение максимального электромагнитного момента Мmах к номинальному Мном называется перегрузочной способностью синхронной машины или коэффициентом статической перегружаемости:
Пренебрегая реактивной составляющей момента, можно записать
т. е. чем меньше угол θном, соответствующий номинальной нагрузке синхронной машины, тем больше ее перегрузочная способность. Например, у турбогенератора θном= 25÷30°, что соответствует λ = 2,35÷2,0.
Источник
Мощности и моменты синхронного генератора (СГ).
Как известно, мощность синхронной машины (СМ) определяется соотношением:
При работе генератора под нагрузкой, его режим определяется следующими величинами:
1. напряжением в сети ( U);
2. собственной ЭДС генератора (Ео);
3. углом
( U и Ео).
Помимо известной электрической, угол
имеет еще и, так называемую, конструктивную интерпретацию. А именно угол определяется угловым положением полюсов ротора относительно результирующего вращающегося магнитного потока статора. Итак, Р=f( U, Ео, ). Вместе с тем, когда генератор работает с сетью бесконечно большой мощности, то U=const, f=const. Кроме того, если синхронный генератор (СГ) работает в стационарном режиме, то его собственная ЭДС Ео=const. То есть мощность синхронного генератора (СГ) Р в этом наиболее распространенном случае зависит только от угла .
Получим общую формулу мощности синхронного генератора (СГ) для явнополюсного синхронного генератора (СГ) на основании его векторной упрощенной диаграммы при допущении, что Ra=0 ( r
Откуда можно выразить составляющие токи:
Путем проведения преобразований с учетом формул (20) и (21) можно получит в итоге общую формулу мощности для явнополюсного синхронного генератора (СГ):
Угловые характеристики синхронного генератора.
Зависимости
представленные графически, называются угловыми характеристиками синхронной машины.
Данная характеристика активной мощности получена при условии:
1- основная составляющая эм момента (изменяется пропорционально синусу θ)
2- реактивная составляющая момента (изменяется пропорционально синусу 2θ)
3- итоговая (результирующая) кривая момента и соответственно эм мощности.
| Значения составляющих тока якоря исходя из векторной диаграммы: Подставляя это в ранее определенное выражения для мощности получим:
|
Уравнение для угловой характеристики активной мощности явнополюсной СМ имеет две составляющие. Первая составляющая зависит как от напряжения, так и от ЭДС, созданной магнитодвижущей силой обмотки возбуждения. Вторая составляющая не зависит от возбуждения машины. Она возникает вследствие различия в индуктивных сопротивлениях по продольной и поперечной осям. За счет этой составляющей явнополюсный генератор может работать параллельно с сетью и при отсутствии тока возбуждения, когда Е=0. В этом случае магнитный поток будет создаваться только реакцией якоря. При номинальном возбуждении амплитуда второй составляющей мощности составляет 20-35% амплитуды первой, основной составляющей.
§3 Электромагнитная мощность синхронной машины
П1 Упрощенная эквивалентная схема и векторная диаграмма неявнополюсного синхронного генератора
Как следует из энергетической диаграммы электромагнитная мощность синхронного генератора Р эм меньше его полезной мощности Р 2 на величину потерь в меди и стали статора. Но уже в машинах средней мощности эти потери составляют только около 1 процента номинальной мощности машины. На этом основании ими можно пренебречь и считать электромагнитную мощность машины равной ее полезной мощности . (1)
Такому упрощению соответствует эквивалентная схема без резистора r, учитывающего потери статора, и векторная диаграмма представленная на рисунке 19.
Упрощенная эквивалентная схема и векторная диаграмма явнополюсного СГ.
Кроме того, здесь индуктивные сопротивления учитывающие реакцию якоря х а и потоки рассеяния x s объединены в индуктивное сопротивление х с, называемое синхронным сопротивлением статорной обмотки. . (2)
На упрощенной векторной диаграмме угол
называют углом рассогласования полюсов ротора и результирующего поля машины.
П2 Электромагнитная мощность синхронной машины
Проведем из конца вектора Е 10 перпендикуляр аk на направление вектора U. Этот перпендикуляр с вектором jI 1x c образует угол . Отсюда следует, что . Или . Подставив это выражение в формулу мощности (1) имеем:
Вопросы для самоконтроля.
- Почему оказывается возможным считать электромагнитную мощность машины равной ее полезной мощности? (1)
- Что такое синхронное сопротивление статорной обмотки? (2)
- Как электромагнитная мощность синхронной машины связана с углом рассогласования полюсов? (3)
Источник
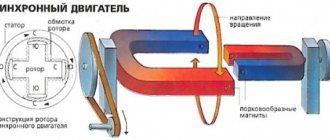
Синхронный двигатель
Принцип действия синхронного двигателя.
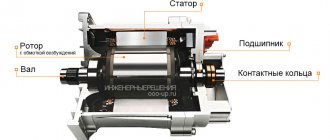
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС , которая направлена против напряжения сети . Сумма ЭДС с учётом падения напряжения на активном сопротивлении обмотки статора уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что =0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор, где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя .
Механический момент на валу двигателя ,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.