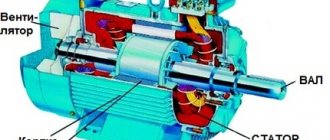
Конструкция синхронного электродвигателя с обмоткой возбуждения
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.
Синхронный электродвигатель с обмоткой возбуждения (щетки не показаны)
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
Принцип работы
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».
Взаимодействие между вращающимся (у статора) и постоянным (у ротора) магнитными полями
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил. Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Магнитные поля ротора и статора сцепленные друг с другом
Варианты исполнения
1 – шестерня; 2 – муфта; 3 – рычаг; 4, 9 – крышки; 5 – реле; 6 – коллектор; 7 – щетки; 8 – втулка; 10 – болт; 11 – корпус; 12 – полюс; 13 – якорь; 14 – кольцо; 15, 16 – обоймы; 17 – плунжер; 18 – ролик
В стальном корпусе 11 стартера (схема 1) закреплены четыре полюса 12 с обмотками возбуждения, три из которых соединены с обмоткой якоря 13 последовательно и одна параллельно.
Вал якоря стартера вращается в двух втулках 8 из спеченных материалов, пропитанных маслом. Втулка заднего конца вала запрессована в крышку 9, а втулка переднего конца вала – в картере сцепления. На переднем конце вала якоря находится привод стартера, включающий в себя муфту свободного хода 2 и шестерню 1 привода, которые при включении стартера перемещаются по шлицам вала. Крышки стартера отлиты из алюминиевого сплава.
На передней крышке 4 закреплено тяговое реле 5, связанное через пластмассовый рычаг 3 и кольцо 14 с приводом стартера. Реле обеспечивает ввод шестерни в зацепление с венцом маховика и подключение электрической цепи обмоток стартера к аккумуляторной батарее при пуске двигателя.
На задней крышке 9 установлены щеткодержатели с четырьмя медно-графитовыми щетками 7. Щетки прижимаются пружинами к торцовому коллектору 6 якоря. Торцовый коллектор выполнен в виде пластмассового диска, в котором залиты медные контактные пластины. Такой коллектор уменьшает длину стартера, снижает его массу и способствует более стабильной и длительной работе щеточных контактов. Крышки и корпус стартера стянуты между собой двумя болтами 10.
Муфта свободного хода 2 состоит из наружной 16 и внутренней 15 обойм. Внутренняя обойма объединена с шестерней привода стартера. Наружная обойма объединена со ступицей, которая через спиральные шлицы соединена с валом якоря. Спиральные шлицы обеспечивают поворот муфты при ее перемещении вдоль вала, что облегчает ввод в зацепление зубьев шестерни 1 стартера и венца маховика.
В наружной обойме имеются три паза переменной ширины, в которых размещены ролики 18 и поджимные плунжеры 17 с пружинами. Ролики постоянно отжимаются в суженную часть вырезов, заклинивая наружную и внутреннюю обойм. При пуске двигателя заклинивание обойм усиливается, а после пуска обоймы расклиниваются, так как ролики, преодолевая сопротивление пружин поджимных плунжеров, выкатываются в расширенную часть пазов наружной обоймы муфты.
Источник
Прямой запуск синхронного двигателя от электрической сети
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении. Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы. В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой. При запуске электродвигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью. При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю. Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Двигатели параллельного возбуждения
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв –ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
n = nх – bМ, (1.8)
где b = Rя/СЕФ.
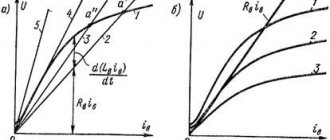
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя ~ М.
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв имагнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n = ,
(1.9)
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I) в регулировочном реостате, по которому протекает весь ток якоря.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
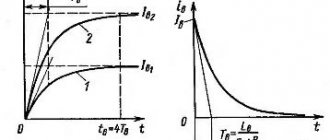
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическоеторможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx(n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc(где Uc– напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n =
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.