Практически все синхронные машины имеют демпферную систему. В явнополюсных машинах это короткозамкнутая обмотка типа «беличья клетка», уложенная в пазах на полюсных наконечников ротора. Обычно она неполная, т.к. в междуполюсных промежутках стержней демпферной обмотки нет. В неявнополюсных машинах роль демпферной системы выполняет массивное тело ротора, в котором в переходных режимах индуктируются вихревые токи. Они и создают демпферный эффект. Поскольку ротор неявнополюсных машин цилиндрический, то демпферная система у них практически симметричная, несмотря на наличие пазов, в которых располагают витки обмотки возбуждения.
При параллельной работе синхронных генераторов или при работе синхронной машины в режиме двигателя вполне возможны случаи выпадения машины из синхронизма с сетью. Причинами этого явления могут быть:
— резкое снижение напряжения сети Uс;
— уменьшение тока возбуждения машины и как следствие этого – уменьшение ЭДС машины Ег;
— резкое увеличение вращающего момента первичного двигателя при работе машины генератором или резкое увеличение момента сопротивления на валу при работе двигателем.
Выпадение из синхронизма произойдет, если будет нарушено условие устойчивости, в частности, если внешний момент (момент первичного двигателя) превзойдет максимальное значение синхронного момента или при увеличении угла θ свыше значения критического угла θВ. После выпадения из синхронизма угловая скорость ротора под действием внешнего момента станет больше синхронной, если машина работала генератором, или меньше синхронной, если машина работала двигателем. Естественно, что возникнет скольжение ротора относительно поля статора, сущность которого аналогична скольжению ротора асинхронного двигателя или асинхронного генератора. По мере отклонения скорости ротора от скорости поля статора это скольжение будет возрастать. Следовательно, синхронная машина станет работать в асинхронном режиме. При этом необходимо различать асинхронный режим возбужденной машины от асинхронного режима невозбужденной машины.
Допустим, что синхронная машина вышла из синхронизма за счет прекращения подачи питания в обмотку возбуждения. Допустим также, что машина работала генератором. При отсутствии тока возбуждения станет равным нулю электромагнитный тормозной момент генератора, он перестанет отдавать в сеть активную и реактивную мощность, а первичный двигатель увеличит частоту вращения ротора.
По мере увеличения частоты вращения возникнет скольжение так как |n| > |n1|. Следовательно, возникнет асинхронный электромагнитный тормозной момент как в генераторном режиме асинхронной машины. Работа синхронной машины в этом режиме соответствует начальной части асинхронной характеристики в третьем квадрате, как показано на рисунке 2. По мере увеличения скольжения электромагнитный тормозной момент возрастает и при некоторых условиях может уравновесить вращающий момент первичного двигателя. То есть будет отдавать в сеть активную мощность, практически равную мощности исходного синхронного режима. Однако ток в обмотке статора будет значительно больше, чем в исходном режиме, поскольку машина будет потреблять из сети реактивную мощность, необходимую для создания магнитного поля машины. Кроме того, в демпферной обмотке или в массиве неявнополюсного ротора будут протекать достаточно большие токи. Эффективность и возможная длительность этого режима зависит от конструкции ротора. Неявнополюсные машины имеют весьма мощную и симметричную демпферную систему, что обеспечивает им большой максимальный асинхронный момент, который в 2 – 3 раза превышает номинальный внешний момент синхронного режима. В явнополюсных машинах демпферная обмотка несимметрична, поэтому ее асинхронный момент невелик. Кроме того, он является пульсирующим Следовательно, эффективность асинхронного момента еще более снижается.
Таким образом, неявнополюсные синхронные машины в асинхронном режиме могут работать даже при номинальной мощности достаточно долго – около 30минут. Длительная работа в асинхронном режиме невозможна и у них, поскольку реактивная мощность и повышенные токи в обмотках статора и ротора ведут к перегреву машины и к необходимости снижения отдаваемой в сеть активной мощности. В явнополюсных асинхронный режим значительно более напряженный, поэтому длительность работы в этом режиме меньше и требует снижения отдаваемой в сеть активной мощности. Практически при отсутствии возбуждения в течение 10 – 15 сек.. машину необходимо отключить от сети.
Следует отметить, что в любом случае при асинхронном режиме и отсутствии возбуждения обмотка возбуждения должна быть замкнута на гасительное (разрядное) сопротивление или замкнута накоротко для предотвращения пробоя изоляции.
Асинхронный режим при наличии питания обмотки возбуждения аналогичен режиму грубой синхронизации и сопровождается резкими бросками тока в обмотках, провалами напряжения особенно при больших скольжениях ротора относительно поля статора. Поэтому в случае выхода из синхронизма синхронной машины необходимо перевести ее в режим ресинхронизации в зависимости от конструкции машины и причины выхода в асинхронный режим. Во многих случаях ресинхронизация происходит автоматически, если выход из синхронизма произошел из-за кратковременного провала напряжения сети, а питание обмотки возбуждения не прерывалось. Иначе говоря, процесс самосинхронизации проходит после восстановления напряжения сети.
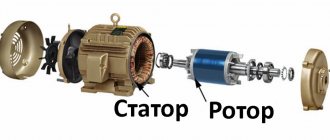
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Принцип работы
Хорошо усвоить принцип работы асинхронного механизма поможет предварительное ознакомление с основами функционирования генераторных машин синхронного типа. Дело в том, что синхронные и асинхронные генераторы по своему устройству и способу действия очень схожи и отличаются лишь небольшими деталями (конструкцией вращающегося ротора, в частности).
В механизмах первого класса используется ротор с размещёнными на нем постоянными магнитами. При его вращении от механического привода магнитные элементы наводят в статоре меняющееся по величине и направлению э/м поле, обеспечивающее протекание переменного тока в подключённой к его зажимам нагрузке. При этом сам ротор вращается без рассогласования с создаваемой им в катушках ЭДС (синфазно с ней).
В отличие от синхронных машин, асинхронный генератор характеризуется наличием небольшого отставания вращения роторного элемента устройства по отношению к наводимому в статоре электромагнитному полю. Последнее как бы тормозит его движение, что принято называть «эффектом скольжения».
Обратите внимание! Указанное явление объясняется особенностью конструкции ротора АГ, изготавливаемого в виде короткозамкнутой цельной решётки (так называемого «беличьего колеса»). Её внешний вид приводится на фото ниже.
Ротор «беличье колесо»
При вращении приводного вала под воздействием внешнего механического импульса (от двигателя внутреннего сгорания, например) за счёт остаточного магнетизма статора в решётке такого ротора наводится собственная ЭДС. Вследствие этого оба поля (и подвижное, и неподвижное) начинают взаимодействовать друг с другом в динамическом режиме.
Поскольку поле в обмотках ротора наводится с задержкой относительно неподвижного статора генератора, он несколько отстаёт от наводимого в ней э/м поля (то есть вращается асинхронно).
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Асинхронный режим работы генераторов
Такой режим возникает при потере возбуждения генераторов вследствие повреждений в системе возбуждения или ошибочных отключений автомата гашения поля, а также при выпадении машины из синхронизма в результате коротких замыканий в сети. Ниже рассматривается режим, обусловленный потерей возбуждения.
С уменьшением тока возбуждения уменьшается тормозящий электромагнитный момент генератора; при некотором значении тока возбуждения этот момент оказывается меньше вращающего момента турбины и генератор выпадает из синхронизма. За счет избыточного вращающего момента ротор ускоряется. Магнитное поле статора, вращающееся в пространстве с синхронной .частотой вращения, пересекает ротор и наводит в теле ротора, в демпферных обмотках и в обмотке возбуждения (если она замкнута) токи с частотой скольжения.
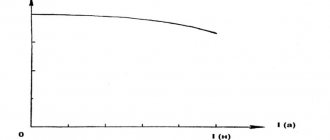
Эти токи создают тормозящий асинхронный момент, и генератор начинает выдавать активную мощность в сеть. Частота вращения ротора увеличивается до тех пор, пока асинхронный момент не станет равным вращающему моменту турбины. Так как регулятор частоты вращения турбины при увеличении частоты вращения действует на уменьшение количества пара или воды, пропускаемой через турбину,
Рис. 19-23. Характеристики турбины и асинхронных моментов генераторов.
I
— характеристика регулирования турбины;
2—
асинхронный момент турбогенератора;
3
—асинхронный момент гидрогенератора с демпферными обмотками;
4
—асинхронный момент гидрогенератора без демпферных обмоток. то с увеличением частоты вращения вращающий момент турбины уменьшается от
т0
до
m1
и
т2,
определяемых точками пересечения характеристики регулирования турбины (кривая / на рис. 19-23) с характеристиками асинхронных моментов генераторов (кривые
2
и
3).
При этом активная мощность, развиваемая генераторами, также уменьшается от
Po=mo
до
Р1
=
m1
, и Р2=
т2
.Скольжение s, с которым работает генератор в асинхронном режиме, определяет потери мощности в роторе и его нагрев (большему скольжению соответствуют большие потери и нагрев ротора) Чем больше максимальный асинхронный момент и круче кривая асинхронного момента генератора, тем с большей мощностью и при меньшем скольжении он работает. В асинхронном режиме генератор потребляет из сети большую реактивную мощность для намагничивания. Поэтому напряжение на выводах генератора и в сети снижается. Потребляемый реактивный ток зависит от индуктивных сопротивлений генератора
хd
и
хq
и скольжения s, с которым работает генератор: чем больше
xd
и
xq
и меньше s, тем меньше потребляемый реактивный ток. Гидрогенераторы без демпферных обмоток имеют небольшой асинхронный момент и пологую характеристику асинхронного момента (кривая
4),
поэтому в асинхронном режиме они развивают большую частоту вращения и снижают нагрузку почти до нуля. Гидрогенераторы с демпферными обмотками имеют больший асинхронный момент и более крутую характеристику асинхронного момента (кривая
3).
Однако s велико (3—5%), поэтому возникает опасность перегрева демпферной обмотки. Кроме того, у ГГ индуктивные сопротивления
xd
и
xq
меньше, чем у ТГ, поэтому, даже работая без активной нагрузки, они потребляют из сети большой реактивный ток (он превышает номинальный ток статора, так как
хq<_1).
В связи со сказанным работа гидрогенераторов без демпферных обмоток в асинхронном режиме недопустима, а работа гидрогенераторов с демпферными обмотками допустима только в течение нескольких секунд, необходимых для быстрого восстановления возбуждения. ТГ имеют более благоприятную характеристику асинхронного момента, чем гидрогенераторы (кривая
2).
Для ТГ малой и средней мощности (до 100 МВт) с косвенной системой охлаждения и с непосредственным охлаждением обмотки ротора допускаемая продолжительность асинхронного режима составляет не более 30 мин при работе с активной нагрузкой 50—70% номинальной.. ТГ с непосред. охлаждением имеют большие значения сверхпереходных и переходных сопротивлений и соответственно меньшие значения среднего асинхронного момента ,поэтому при асинхронном режиме они работают с повышенными скольжением и током статора. Для ТГ с непосредственным охлаждением рекомендуется работа с нагрузкой, не более 60% номинальной в течение 3—4 мин.
18.Несимметричные режимы работы генераторов.
Такие режимы могут быть вызваны обрывами или отключениями одной фазы линии, отключением одной из фаз трансформаторной группы, однофазной нагрузкой в виде электротяги и плавильных печей и др. Возникающие при несимметричном режиме токи обратной последовательности создают дополнительный нагрев обмотки статора. Магнитное поле обратной последовательности, вращаясь относительно ротора с двойной синхронной частотой вращения, наводит в обмотке возбуждения, в демпферных контурах, а также в теле ротора и его торцовой контактной зоне (клин, зуб, бандаж) токи частотой 100 Гц. Эти токи создают дополнительный нагрев соответствующих частей ротора. Кроме того, поле обратной последовательности создает знакопеременный момент, который вызывает механические напряжения и вибрации машины.
Тепловое действие токов двойной частоты наиболее опасно для турбогенераторов, так как их ротор выполняется из цельной поковки и имеет большую поверхность, вследствие чего эти токи могут быть значительными. Ввиду повышенной частоты токи вытесняются на поверхность тела ротора и замыкаются через пазовые клинья и бандажные кольца. Поэтому наибольший нагрев происходит в торцовых зонах ротора .Дополнительный нагрев обмотки ротора представляет опасность для ее изоляции. Дополнительные механические напряжения в турбогенераторах незначительны и практически не влияют на их механическую прочность.
В гидрогенераторах в силу отсутствия массивных частей на роторе токи двойной частоты и соответственно нагрев ротора меньше, чем в турбогенераторах. Обычно эти токи приводят к повышенному нагреву демпферной обмотки. Дополнительные механические напряжения и вибрации у гидрогенераторов больше, чему турбогенераторов.
При работе генератора в продолжительном несимметричном режиме ток наиболее нагруженной фазы статора по условию допускаемого нагрева обмотки не должен превышать номинального. Кроме того, температура наиболее нагретых частей ротора, а также механические напряжения и вибрации генератора не должны превышать допускаемых значений. Обычно предельные допускаемые значения тока обратной последовательности для турбогенераторов определяются допускаемым нагревом торцовой контактной зоны ротора, а для гидрогенераторов — допускаемым нагревом демпферной системы и обмотки возбуждения, а также вибрациями конструктивных частей и обмотки статора. В соответствии со сказанным выше наибольшая разность токов в фазах статора при длительном несимметричном режиме не должна превышать 15—20% для гидрогенераторов с косвенной системой охлаждения и 10% для гидрогенераторов с непосредственной системой охлаждения и для турбогенераторов всех типов. Приэтом ток обратной последовательности примерно равен: для гидрогенераторов с косвенной системой охлаждения 7,5—10% тока прямой последовательности, а для гидрогенераторов с непосредственной системой охлаждения и турбогенераторов —5-7%.
При несимметричных к. з. в сетидопускаемая продолжительность замыкания t,
с, не должна превышать значения, определяемого из формулы I22t ≤ B/Iном2
где /2 — ток обратной последовательности в долях от номинального; Iном — номинальный ток генератора, А; В —импульс квадратичного тока к. з., А2с.
Значение B/Iном2 принимается равным для гидрогенераторов с косвенным охлаждением 45 с, для турбогенераторов с косвенным охлаждением 30 с идля турбо- и гидрогенераторов с непосредственным охлаждением 8 с.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.