Almost all synchronous machines have a damper system. In salient-pole machines, this is a short-circuited squirrel-cage winding placed in slots on the rotor pole pieces. Usually it is incomplete, because There is no damper winding in the interpolar spaces of the rods. In non-salient-pole machines, the role of a damper system is performed by a massive rotor body, in which eddy currents are induced in transient conditions. They create a damping effect. Since the rotor of non-salient-pole machines is cylindrical, their damper system is almost symmetrical, despite the presence of slots in which the field winding turns are located.
When synchronous generators operate in parallel or when a synchronous machine operates in motor mode, cases of the machine falling out of synchronization with the network are quite possible. The reasons for this phenomenon may be:
— a sharp decrease in network voltage Uс;
- a decrease in the excitation current of the machine and, as a consequence of this, a decrease in the EMF of the machine Er;
- a sharp increase in the torque of the primary engine when the machine is operating as a generator or a sharp increase in the moment of resistance on the shaft when the engine is operating.
Loss of synchronism will occur if the stability condition is violated, in particular, if the external torque (torque of the prime mover) exceeds the maximum value of the synchronous torque or when the angle θ above the value of the critical angle θB. After falling out of synchronism, the angular velocity of the rotor under the influence of an external torque will become more synchronous if the machine was working as a generator, or less than synchronous if the machine was working as a motor. Naturally, the rotor will slip relative to the stator field, the essence of which is similar to the rotor slip of an asynchronous motor or asynchronous generator. As the rotor speed deviates from the stator field speed, this slip will increase. Consequently, the synchronous machine will operate in asynchronous mode. In this case, it is necessary to distinguish the asynchronous mode of an excited machine from the asynchronous mode of an unexcited machine.
Let us assume that a synchronous machine is out of synchronism due to the loss of power supply to the field winding. Let's also assume that the machine worked as a generator. In the absence of excitation current, the electromagnetic braking torque of the generator will become zero, it will stop supplying active and reactive power to the network, and the prime mover will increase the rotor speed.
As the rotation speed increases, slip will occur since |n| > |n1|. Consequently, an asynchronous electromagnetic braking torque will arise, as in the generator mode of an asynchronous machine. The operation of a synchronous machine in this mode corresponds to the initial part of the asynchronous characteristic in the third square, as shown in Figure 2. As slip increases, the electromagnetic braking torque increases and under some conditions can balance the torque of the prime mover. That is, it will supply active power to the network that is almost equal to the power of the original synchronous mode. However, the current in the stator winding will be significantly greater than in the original mode, since the machine will consume reactive power from the network necessary to create the magnetic field of the machine. In addition, quite large currents will flow in the damper winding or in the non-salient-pole rotor array. The efficiency and possible duration of this mode depends on the design of the rotor. Non-salient pole machines have a very powerful and symmetrical damper system, which provides them with a large maximum asynchronous torque, which is 2 - 3 times higher than the rated external torque of the synchronous mode. In salient-pole machines, the damper winding is asymmetrical, so its asynchronous torque is small. In addition, it is pulsating. Therefore, the efficiency of asynchronous torque is further reduced.
Thus, non-salient-pole synchronous machines in asynchronous mode can operate even at rated power for quite a long time - about 30 minutes. Long-term operation in asynchronous mode is also impossible for them, since reactive power and increased currents in the stator and rotor windings lead to overheating of the machine and the need to reduce the active power supplied to the network. In salient-pole asynchronous modes, the asynchronous mode is much more intense, so the duration of operation in this mode is shorter and requires a reduction in the active power supplied to the network. If there is practically no excitation for 10 - 15 seconds, the machine must be disconnected from the network.
It should be noted that in any case, in asynchronous mode and there is no excitation, the excitation winding must be closed to a damping (discharge) resistance or short-circuited to prevent insulation breakdown.
The asynchronous mode in the presence of power to the excitation winding is similar to the rough synchronization mode and is accompanied by sharp current surges in the windings and voltage dips, especially with large slips of the rotor relative to the stator field. Therefore, if a synchronous machine goes out of synchronism, it is necessary to transfer it to the resynchronization mode, depending on the design of the machine and the reason for entering the asynchronous mode. In many cases, resynchronization occurs automatically if the synchronization is lost due to a short-term failure of the mains voltage, and the power supply to the field winding is not interrupted. In other words, the self-synchronization process takes place after the network voltage is restored.
Synchronous motor device
The design of a synchronous motor consists of two main parts - the stator and the rotor. The stator is the stationary part of the unit, and the rotor is the movable part. The armature consists of one or more alternating current windings. When the motor is running, the currents entering the armature lead to rotation of the magnetic field, which intersects with the field of the inductor and converts energy. The anchor field has another name - the anchor reaction field. In a generator, such a field is created using an inductor.
The inductor contains DC electromagnets called poles. In all synchronous electric motors, inductors come in two designs - salient-pole and non-salient-pole, differing in the arrangement of the poles. The stator design includes a housing and a core, which includes two- and three-phase windings. The windings themselves can be distributed or concentrated.
To reduce magnetic resistance and improve the passage of magnetic flux, ferromagnetic cores are used, located in the rotor and stator, for the manufacture of which electrical steel is used. It has interesting properties, such as increased silicon content, in order to increase its electrical resistance and reduce eddy currents.
Each synchronous electric motor has an important parameter - electromagnetic torque. It occurs when the magnetic flux of the rotor begins to interact with the rotating magnetic field. This field is formed under the influence of three-phase current flowing through the armature winding.
In idle mode, the axes of the magnetic fields of the rotor and stator coincide. Therefore, the electromagnetic forces arising between their poles take a radial direction and the value of the electromagnetic moment of the unit becomes equal to zero. When the device switches to motor mode, the rotor begins to be affected by external load torque applied to the shaft. As a result, the rotor is displaced by a certain angle against the direction of rotation.
Such electromagnetic interaction between the rotor and stator leads to the creation of electromagnetic forces directed in the direction of rotation. Thus, the action of the rotating electromagnetic torque tends to overcome the action of the external torque. The maximum value of the electromagnetic torque forms an angle of 90 degrees when the rotor poles are located between the axes of the stator poles.
If the load torque applied to the motor shaft exceeds the maximum electromagnetic torque, the motor will stop under the influence of an external torque. Because of this, in a stationary motor, a very high current will flow through the armature winding. This mode is an emergency; it represents a loss of synchronism and should not be allowed in practice.
Principle of operation
A preliminary acquaintance with the basics of the functioning of synchronous-type generator machines will help you to understand well the principle of operation of an asynchronous mechanism. The fact is that synchronous and asynchronous generators are very similar in their design and method of operation and differ only in small details (the design of the rotating rotor, in particular).
The first class mechanisms use a rotor with permanent magnets placed on it. When it rotates from a mechanical drive, magnetic elements induce an electromagnetic field in the stator that varies in magnitude and direction, ensuring the flow of alternating current in the load connected to its terminals. In this case, the rotor itself rotates without mismatch with the EMF it creates in the coils (in phase with it).
Unlike synchronous machines, an asynchronous generator is characterized by the presence of a slight lag in the rotation of the rotor element of the device in relation to the electromagnetic field induced in the stator. The latter seems to slow down its movement, which is commonly called the “sliding effect.”
Note! This phenomenon is explained by the design feature of the AG rotor, manufactured in the form of a short-circuited solid lattice (the so-called “squirrel wheel”). Its appearance is shown in the photo below.
Squirrel wheel rotor
When the drive shaft rotates under the influence of an external mechanical impulse (from an internal combustion engine, for example), due to the residual magnetism of the stator, its own EMF is induced in the grid of such a rotor. As a result, both fields (moving and stationary) begin to interact with each other in a dynamic mode.
Since the field in the rotor windings is induced with a delay relative to the stationary stator of the generator, it lags somewhat behind the e/m field induced in it (that is, it rotates asynchronously).
How does a synchronous motor work?
The operating principle of a synchronous motor is based on the mutual influence of the magnetic fields of the armature and the poles of the inductor. With the reversed design of the unit, the location of the armature and inductor is reversed, that is, the first is located on the rotor, and the other on the stator. This option is used by cryogenic synchronous machines, in which the excitation windings include materials with superconducting properties.
When the engine is started, it is accelerated to a frequency close to the one at which the magnetic field rotates in the gap. Only after this does it go into synchronous mode. In this situation, the magnetic fields of the armature and inductor intersect. This moment is called entering synchronization.
When accelerating, the asynchronous mode state is used, when the inductor windings are closed using a rheostat or short-circuited, similar to asynchronous machines. In order to start in this mode, the rotor is equipped with a short-circuited winding, which is also a calming winding that can eliminate rotor swinging during synchronization. After the speed is close to the rated speed, a direct current is supplied to the inductor.
Thus, a synchronous motor is not only a motor, but also a kind of generator, since they have the same design. The engine operation diagram will be as follows. The armature winding is connected to three-phase alternating current, and direct current is supplied to the excitation winding from an external source. The rotating magnetic field created by the three-phase winding and the field created by the field winding interact with each other. This causes the appearance of an electromagnetic torque, causing the rotor to rotate.
For motors where permanent magnets are installed, special external accelerating motors are used. Unlike asynchronous devices, the acceleration of the rotor in a synchronous motor must reach the rotational speed of the magnetic field. This is due to the supply of current to the rotor winding from an external source, and is not induced in it under the influence of the stator magnetic field, therefore, it is not affected by the shaft rotation speed. As a result, the AC synchronous motor acquires a constant rotor speed regardless of the load. The specific operating principle of these devices influenced their starting and speed control.
Asynchronous operation of generators
This mode occurs when generators lose excitation due to damage in the excitation system or erroneous shutdowns of the field suppression machine, as well as when the machine falls out of synchronization as a result of short circuits in the network. Below we consider the mode caused by loss of excitation.
As the excitation current decreases, the braking electromagnetic torque of the generator decreases; at a certain value of the excitation current, this torque turns out to be less than the torque of the turbine and the generator falls out of synchronism. Due to the excess torque, the rotor accelerates. The magnetic field of the stator, rotating in space with a synchronous rotation frequency, crosses the rotor and induces currents with a slip frequency in the rotor body, in the damper windings and in the field winding (if it is closed).
These currents create a braking asynchronous torque, and the generator begins to supply active power to the network. The rotor speed increases until the asynchronous torque becomes equal to the turbine torque. Since the turbine speed controller, when the rotation speed increases, acts to reduce the amount of steam or water passed through the turbine,
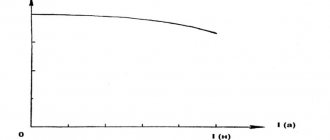
Rice. 19-23. Characteristics of turbines and asynchronous torques of generators.
I
— turbine control characteristics;
2—
asynchronous torque of the turbogenerator;
3
—asynchronous torque of a hydrogenerator with damper windings;
4
—asynchronous torque of a hydrogenerator without damper windings.
then, with an increase in rotational speed, the turbine torque decreases from t0
to
m1
and
t2,
determined by the points of intersection of the turbine control characteristics (curve / in Fig. 19-23) with the characteristics of the asynchronous torques of the generators (curves
2
and
3).
At the same time, the active power developed by the generators also decreases from
Po = mo
to
P1
=
m1
, and P2 =
m2
. The slip s with which the generator operates in asynchronous mode determines the power losses in the rotor and its heating (greater slip corresponds to greater losses and heating of the rotor) The greater the maximum asynchronous torque and the steeper the asynchronous torque curve of the generator, the more power and less slip it operates.
In asynchronous mode, the generator consumes more reactive power from the network for magnetization. Therefore, the voltage at the terminals of the generator and in the network decreases. The consumed reactive current depends on the inductive reactances of the generator xd
and
xq
and the slip s with which the generator operates: the more
xd
and
xq
and the less s, the less the consumed reactive current.
Hydrogenerators without damper windings have a small asynchronous torque and a flat characteristic of the asynchronous torque (curve 4),
therefore in asynchronous mode they develop a high rotation speed and reduce the load almost to zero.
Hydrogenerators with damper windings have a larger asynchronous torque and a steeper asynchronous torque characteristic (curve 3).
However, s is large (3-5%), so there is a danger of overheating of the damper winding.
In addition, the inductive reactances xd
and
xq
are smaller than those of the TG, therefore, even when operating without an active load, they consume a large reactive current from the network (it exceeds the rated stator current, since
xq<_1).
In connection with the above, the operation of hydraulic generators without damper windings in asynchronous mode is unacceptable, and the operation of hydraulic generators with damper windings is permissible only for a few seconds, necessary for the rapid restoration of excitation.
TGs have a more favorable asynchronous torque characteristic than hydrogen generators (curve 2).
For TG of low and medium power (up to 100 MW) with an indirect cooling system and with direct cooling of the rotor winding, the permissible duration of the asynchronous mode is no more than 30 minutes when operating with an active load of 50-70% of the rated load. TG with direct. cooling, they have larger values of supertransient and transition resistances and, accordingly, smaller values of the average asynchronous torque, therefore, in asynchronous mode, they operate with increased slip and stator current. For TG with direct cooling, it is recommended to operate with a load of no more than 60% of the nominal load for 3-4 minutes.
18. Asymmetrical operating modes of generators.
Such modes can be caused by breaks or disconnections of one phase of the line, disconnection of one of the phases of the transformer group, single-phase load in the form of electric traction and melting furnaces, etc. Negative sequence currents arising during asymmetrical mode create additional heating of the stator winding. The negative sequence magnetic field, rotating relative to the rotor at double synchronous rotation speed, induces currents with a frequency of 100 Hz in the excitation winding, in the damper circuits, as well as in the rotor body and its end contact zone (wedge, tooth, bandage). These currents create additional heating of the corresponding parts of the rotor. In addition, the negative sequence field creates an alternating torque, which causes mechanical stress and vibration of the machine.
The thermal effect of double-frequency currents is most dangerous for turbogenerators, since their rotor is made of a solid forging and has a large surface, as a result of which these currents can be significant. Due to the increased frequency, currents are forced onto the surface of the rotor body and are closed through the slot wedges and banding rings. Therefore, the greatest heating occurs in the end zones of the rotor. Additional heating of the rotor winding poses a danger to its insulation. Additional mechanical stresses in turbogenerators are insignificant and have virtually no effect on their mechanical strength.
In hydrogenerators, due to the absence of massive parts on the rotor, double-frequency currents and, accordingly, heating of the rotor are less than in turbogenerators. Typically, these currents lead to increased heating of the damper winding. Additional mechanical stresses and vibrations are greater for hydraulic generators than for turbogenerators.
When the generator operates in continuous asymmetrical mode, the current of the most loaded phase of the stator, according to the condition of permissible heating of the winding, should not exceed the rated one. In addition, the temperature of the hottest parts of the rotor, as well as mechanical stress and vibration of the generator should not exceed permissible values. Typically, the maximum permissible values of the negative sequence current for turbogenerators are determined by the permissible heating of the end contact zone of the rotor, and for hydraulic generators - by the permissible heating of the damper system and field winding, as well as vibrations of structural parts and the stator winding. In accordance with the above, the largest current difference in the stator phases during long-term asymmetrical mode should not exceed 15-20% for hydrogenerators with an indirect cooling system and 10% for hydrogenerators with a direct cooling system and for turbogenerators of all types. In this case, the negative sequence current is approximately equal: for hydrogenerators with an indirect cooling system, 7.5-10% of the positive sequence current, and for hydrogenerators with a direct cooling system and turbogenerators - 5-7%.
For asymmetrical short circuits in the network , permissible short circuit duration t,
s, should not exceed the value determined from the formula I22t ≤ B/Inom2
where /2 is the negative sequence current in fractions of the nominal; Inom - rated current of the generator, A; B is the quadratic short-circuit current pulse, A2s.
The value of B/Inom2 is assumed to be equal to 45 s for hydrogen generators with indirect cooling, 30 s for turbogenerators with indirect cooling and 8 s for turbo and hydrogen generators with direct cooling.
Engine starting circuit and its adjustment
Synchronous motors do not have an initial starting torque. When the armature winding is connected to an alternating current source, the electromagnetic torque changes its direction twice during one period of current change. This occurs when the rotor is stationary and direct current flows in the field winding.
Thus, the value of the average moment during one period will have a zero value. To see how a synchronous motor works when starting, you need to accelerate its rotor under the influence of an external torque until it rotates at a frequency close to synchronous.
The unit itself can be started in different ways:
- In the first case, an asynchronous switching circuit is used, the basis of which is a dead-connected exciter. This method is used when the static load torque is below 0.4, when there is no voltage drop. The discharge resistance is closed in the excitation winding, thereby eliminating interruptions in the excitation of the winding during intake, since a low rotor rotation speed leads to overvoltage. When the speed becomes close to synchronous, the contactor reacts to this change, resulting in the switching of the field winding from the discharge resistance directly to the exciter armature.
- The second starting option uses a thyristor exciter. This method is considered more reliable due to its high efficiency. Excitation control is greatly simplified. Excitation is supplied automatically using an electromagnetic relay.