Графическое обозначение электрических машин
Для схематичного обозначения была разработана специальная система ЕСКД, согласно которой на чертеже можно отобразить любой двигатель. Его представляют в виде окружности, рядом с которой может указываться буквенное обозначение. Например, ДГ — главный двигатель, ДШ — электродвигатель подачи шпинделя станка, ДО — насоса охлаждения и т.п. Рассмотрим, какие УГО стандартизирует система, полный их перечень приведен в ГОСТ 2.722-68
Двигатели постоянного тока
Машины постоянного тока имеют условное обозначение в зависимости от варианта возбуждения. На рисунке представлен электродвигатель постоянного тока с различными вариантами УГО.
Кроме этого, существует множество устройств с дополнительными функциями. Например, реверсивный электродвигатель с двумя обмотками или с параллельным возбуждением и вибрационным регулятором скорости вращения. Ниже приведены УГО таких устройств.
Асинхронные машины
Асинхронные электродвигатели изображаются на чертежах в виде окружности, внутри которой меньшая окружность, отображающая ротор.
На иллюстрации представлено графическое обозначение асинхронной электрической машины с короткозамкнутым ротором на однолинейной схеме. Для трехфазной сети символическое представление мотора с фазным и короткозамкнутым выполняется подобным образом, отличие состоит лишь в количестве проводов и подключении цепи ротора.
При этом если электродвигатель трехфазный, указывается схема соединения обмоток. Например, соединение звездой обозначается так:
Каждый тип трехфазных асинхронных машин имеет разный вид на чертеже. Ниже приведены варианты графического обозначения двигателей различного исполнения.
Синхронные машины
Синхронные машины по ГОСТ представлены в виде, который указан на нижеприведенной иллюстрации, при этом схема легко читается даже неспециалистом.
Явнополюсная машина с обмоткой на якоре, отображается на схеме в виде двух окружностей, здесь и к наружной, и к центральной подведены провода (к статору и ротору соответственно).
Если обмотки соединены треугольником, то синхронный электродвигатель будет изображен на чертеже несколько иначе.
Остальные разновидности УГО типов электродвигателей на схемах представлены с описанием на рисунке ниже.
Генераторы
Обозначение трехфазных генераторов, как и синхронных двигателей, имеет одинаковое графическое начертание. Ниже приведены изображения, которые отображаются на схеме.
УГО других видов электрических машин
Кроме распространенных устройств, применяются специальные, которые также имеют свое обозначение на схеме.
Специальные приборы типа сельсин-датчиков и приемников имеют кроме графического обозначения еще и буквенное описание, что проиллюстрировано на рисунке ниже.
Двигатель–преобразователь имеет изображение на схеме в соответствии с УГО. Его начертание на схеме приведено на иллюстрации.
Здесь представлены устройства, у которых имеется коллекторный узел. Он имеет УГО в виде двух прямоугольников по сторонам окружности.
Общая схема маркировки электродвигателей
1. Обозначение серии:
АИР, А, 4А, 5А, АД, 7AVER — общепромышленные электродвигатели с привязкой мощностей по ГОСТ 51689-2000
АИС, 6А, IMM, RA, AIS — общепромышленные электродвигатели с привязкой мощностей по евростандарту DIN (CENELEC)
АИМ, АИМЛ, ВА, АВ, ВАО2, 1ВАО, 3В — взрывозащищенные электродвигатели
АИУ, ВРП, АВР, 3АВР, ВР — взрывозащищенные рудничные электродвигатели
А4, ДАЗО4, АОМ, ДАВ, АО4 — высоковольтные электродвигатели
2. Признак модификации:
М- модернизированный электродвигатель (например: АДМ63А2У3)
К- электродвигатель с фазным ротором (например: 5 АНК280А6)
Х- электродвигатель с алюминиевой станиной (например: 5АМХ180М2У3)
Е- однофазный электродвигатель 220В (например: АИРЕ80С2У3)
Н- электродвигатель защищенного исполнения с самовентиляцией (например: 5АН200М2У3)
Ф- электродвигатель защищенного исполнения с принудительным охлаждением
С- электродвигатель с повышенным скольжением (например: АИРС180М4У3)
В- встраиваемый электродвигатель (например: АДМВ63В2У3)
Р- электродвигатель с повышенным пусковым моментом (например: АИРР180S4У3)
П- электродвигатель для привода вентилятора в птицеводческих хозяйствах («птичник»)
3. Габарит (высота оси вращения вала над установочной поверхностью) мм.:
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400
4. Установочные размеры или длина сердечника:
А, В — вариант длины сердечника
S, M, L — вариант длины сердечника и установочных размеров по длине станины
X, XK, Y, YK — вариант длины сердечника статора высоковольтных двигателей
5. Число полюсов:
2 (3000 об/мин), 4 (1500 об/мин), 6 (1000 об/мин), 8 (750 об/мин), 10 (600 об/мин), 12 (500 об/мин)
4/2, 6/4, 8/6, 12/4, 12/6, 6/4/2, 8/6/4 и т.д. — многоскоростные электродвигатели
6. Признак конструктивной модификации:
Б — электродвигатель со встроенным датчиком температурной защиты обмотки
Б1 — электродвигатель с датчиком температурной защиты обмотки и подшипниковых узлов
Б2 — электродвигатель с датчиком температурной защиты обмотки и подогревателем
Е — электродвигатель со встроенным электромагнитным тормозом (например: АИР80А2ЕУ3)
Е2 — электродвигатель со встроенным тормозом и ручкой расторможения
П — электродвигатель с повышенной точностью по установочным размерам
Ж — электтродвигатель для привода моноблочных насосов (например: АИР80А2ЖУ2)
Н — малошумный электродвигатель (например: 5АН180S4/16НЛБУХЛ4)
Л — электродвигатель для привода лифтов (например: 5АН180S4/16НЛБУХЛ4)
С — электродвигатель для привода нефтяных станков-качалок (например: АИР180S4СНУ1)
Тр — электродвигатель для осевых вентиляторов в системах охлаждения трансформаторов
Р3 — электродвигатель для мотор-редукторов
7. Климатическое исполнение (ГОСТ 15150-69)
У — для макроклиматического района с умеренным климатом
УХЛ — для макроклиматических районов с умеренным и холодным климатом
ХЛ — для макроклиматического района с холодным климатом
Т — для макроклиматических районов как с сухим, так и с влажным тропическим климатом
М — для макроклиматического района района с умеренно-холодным морским климатом
О — для всех макроклиматических районов на суше, кроме очень холодного (общеклиматическое исполнение)
В — для всех макроклиматических районов на суше и на море, кроме очень холодного (всеклиматическое исполнение)
8. Категории размещения (ГОСТ 15150-69)
1- для эксплуатации на открытом воздухе
2- для эксплуатации под навесом, в палатках, кузовных прицепах
3- для эксплуатации в помещениях без регулируемых климатических условий
4- для эксплуатации в помещениях с искусственно регулируемыми климатическими условиями
5- для эксплуатации в помещениях с повышенной влажностью
Электрический двигатель постоянного тока
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Схема двигателя постоянного тока с обозначениями
Единая система конструкторской документации
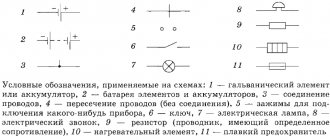
ОБОЗНАЧЕНИЯ УСЛОВНЫЕ ГРАФИЧЕСКИЕ В СХЕМАХ
Unified system for design documentation. Graphic identifications in schemes. Electric machinery
МКС 01.080.40 29.160.01
Дата введения 1971-01-01
УТВЕРЖДЕН Комитетом стандартов, мер и измерительных приборов при Совете Министров СССР в декабре 1967 г. Срок введения установлен с 01.01.71
ВЗАМЕН ГОСТ 7624-62 в части разд.4
ИЗДАНИЕ (ноябрь 2007 г.) с Изменениями N 1, 2, 3, утвержденными в марте 1981 г., июле 1991 г., марте 1994 г. (ИУС 6-81, 10-91, 5-94).
1a. Настоящий стандарт устанавливает условные графические обозначения вращающихся электрических машин на схемах, выполняемых вручную или автоматизированным способом, изделий всех отраслей промышленности и строительства.
(Измененная редакция, Изм. N 1, 3).
1. Устанавливаются три способа построения условных графических обозначений электрических машин:
упрощенный многолинейный (форма I);
развернутый (форма II).
2. В упрощенных однолинейных обозначениях электрических машин обмотки статора и ротора изображают в виде окружностей. Выводы обмоток статора и ротора показывают одной линией с указанием на ней количества выводов в соответствии с требованиями ГОСТ 2.721-74.
В настоящем стандарте примеры упрощенных однолинейных обозначений машин не приведены.
3. В упрощенных многолинейных обозначениях обмотки статора и ротора изображают аналогично упрощенным однолинейным обозначениям, показывая выводы обмоток статора и ротора (черт.1).
4. В развернутых обозначениях обмотки статора изображают в виде цепочек полуокружностей, а обмотки ротора — в виде окружности (и наоборот).
Взаимное расположение обмоток изображают:
а) в машинах переменного тока и универсальных — с учетом (черт.2) или без учета (черт.3) сдвига фаз.
б) в машинах постоянного тока — с учетом (черт.4) или без учета (черт.5) направления магнитного поля, создаваемого обмоткой.
5. В примерах условных графических обозначений машин переменного тока и универсальных машин приведены обозначения, отражающие сдвиг фаз в обмотке; в примерах машин постоянного тока — без учета направления магнитного поля.
6. Выводы обмоток статора и ротора в обозначениях машин всех типов допускается изображать с любой стороны.
В примерах построения условных графических обозначений машин выводы обмоток показаны:
а) в машинах переменного тока: выводы обмоток статора — вверх, обмоток ротора — вниз;
б) в машинах постоянного тока выводы всех обмоток показаны вверх.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
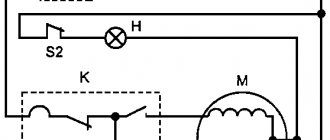
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
Схемы подключения наглядно видно на рисунке 2.
Классификация асинхронных электродвигателей
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электродвигатель состоит из статора (неподвижной части) и ротора (якоря в случае машины постоянного тока) (подвижной части). В статоре уложена обмотка (можно сказать электрическая цепь), по которой, создав напряжение, идёт электрический ток (ток возбуждения). Этот ток возбуждает магнитное поле машины, которое, в свою очередь, приводит в движение подвижную часть (ротор/якорь). Сказав точнее, магнитное поле статора индуцирует ток в обмотке ротора. Взаимодействие магнитного поля статора и электрического поля ротора является причиной движения ротора, точнее создается вращающий момент, именно он и является причиной вращения ротора двигателя. Таким способом и происходит преобразование электрической энергии, подаваемое на обмотку возбуждения, в механическую (кинетическую) энергию вращения. Полученную механическую энергию можно использовать приводя в движение механизмы.
ОБОЗНАЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ
1. серия (тип) электродвигателя 2. электрические модификации 3. габарит электродвигателя 4. длина сердечника и/или длина станины 5. количество полюсов 6. конструктивные модификации 7. климатическое исполнение 8. категория размещения 9. степень защиты 10. мощность 11. число оборотов 12. монтажное исполнение
- Cерия (тип) электродвигателя:
- Электрические модификации:
- Габарит электродвигателя
(высота оси вращения, равен расстоянию от низа лап до центра вала в миллиметрах): - Длина сердечника
и/или длина станины: - Количество полюсов электродвигателя:
- Конструктивные модификации электродвигателя:
- Климатическое исполнение электродвигателя (ГОСТ 15150-69):
- Категория размещения:
- Степень защиты электродвигателя (IP, ГОСТ 17494-87):
- Монтажное исполнение электродвигателей (ГОСТ 2479-79):
Общепромышленные электродвигатели: АИ — обозначение серии общепромышленных электродвигателей, Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е. АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ, АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC). Взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др.
М — модернизированный электродвигатель: АИРМ, 5АМ Н — электродвигатель защищенного исполнения с самовентиляцией: 5АН Ф — электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ К — электродвигатель с фазным ротором: 5АНК С — электродвигатель с повышенным скольжением: АИРС, АС, 4АС, 5АС и др. Е — однофазный электродвигатель 220V: АИРЕ, 5АЕУ В — встраиваемый электродвигатель.
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше.
А, В, С — длина сердечника (первая длина, вторая длина, третья длина) XK, X, YK, Y — длина сердечника статора высоковольтных двигателей S, L, М — установочные размеры по длине станины.
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
Е — электродвигатель с встроенным электромагнитным тормозом: АИР 100L6 Е У3 Е2 — электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 Б — со встроенным датчиком температурной защиты: АИР 180М4 БУ3 Ж — электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 П — электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 Р3 — электродвигатель для мотор-редукторов: АИР 100L6 Р3 С — электродвигатель для станков-качалок: АИР 180М8 СНБУ1 Н — электродвигатель малошумного исполнения: 5АФ 200 МА4/24 УХЛ4 Л — электродвигатель для привода лифтов: 5АФ 200 МА4/24 УХЛ4.
У — умеренный климат Т — тропический климат ХЛ — холодный климат ОМ — на судах морского и речного флота.
5 — в помещении с повышенной влажностью 4 — в помещении с регулируемыми климатическими условиями 3 — в помещении 2 — на улице под навесом 1 — на открытом воздухе.
Первая цифра: защита от твердых объектов: 0 — без защиты 1 — защита от твердых объектов размерами свыше 50 мм (например, от случайного касания руками) 2 — защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) 3 — защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) 4 — защита от твердых объектов размерами свыше 1 мм (например, тонкой проволоки) 5 — защита от пыли (без осаждения опасных материалов). Вторая цифра: защита от жидкостей: 0 — без защиты 1 — защита от вертикально падающей воды (конденсация) 2 — защита от воды, падающей под углом 15° к вертикали 3 — защита от воды, падающей под углом 60° к вертикали 4 — защита от водяных брызг со всех сторон 5 — защита от водяных струй со всех сторон.
Устанавливаются следующие условные обозначения конструктивных исполнений электрических машин (1-я цифра): 1 — машины на лапах с подшипниковыми щитами: с пристроенным редуктором; 2 — машины на лапах с подшипниковыми щитами, с фланцем на подшипниковом щите (или щитах); 3 — машины без лап с подшипниковыми щитами, с фланцем на одном подшипниковом щите (или щитах); с цокольным фланцем; 4 — машины без лап с подшипниковыми щитами, с фланцем на станине; 5 — машины без подшипниковых щитов; 6 — машины на лапах с подшипниковыми щитами и со стояковыми подшипниками; 7 — машины на лапах со стояковыми подшипниками (без подшипниковых щитов); 8 — машины с вертикальным валом, кроме машин групп от IМ 1 до IM 4; 9 — машины специального исполнения по способу монтажа. Условное обозначение способа монтажа электрических машин групп от IM 1 до IM 9 (2 и 3-я цифры): Примечание: полные таблицы есть в ГОСТе. Устанавливаются следующие условные обозначения исполнений концов вала
электрических машин (4-я цифра): 0 — без конца вала; 1 — с одним цилиндрическим концом вала; 2 — с двумя цилиндрическими концами вала; 3 — с одним коническим концом вала; 4 — с двумя коническими концами вала; 5 — с одним фланцевым концом вала; 6 — с двумя фланцевыми концами вала; 7 — с фланцевым концом вала на стороне D (лев.) и цилиндрическим концом вала на стороне N (прав.); 9 — прочие исполнения концов вала.
Условные обозначения электрических машин малой мощности установлены ГОСТ 23264-78
. Установочные размеры проектируемых и модернизируемых — по
ГОСТ 18709-73
.
Поскольку обозначение типов двигателей в большинстве случаев не определены стандартами, приведенные обозначения дают только общую структуру.
Похожие документы:
Электродвигатели асинхронные общего применения; Электродвигатели асинхронные взрывозащищенные; Электродвигатели асинхронные крановые; Электродвигатели с повышенным скольжением.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Условное графическое обозначение электродвигателей на схеме
Для того чтобы нарисовать электрическую схему, применяют условные графические обозначения всех элементов. Так в упрощенном варианте можно изобразить любой элемент – резистор, конденсатор, электродвигатель и т.д. Они стандартизированы для основных видов элементов, в этой статье мы рассмотрим обозначения электрических двигателей на схеме.
- Графическое обозначение электрических машин
- Двигатели постоянного тока
- Асинхронные машины
- Синхронные машины
- Генераторы
- УГО других видов электрических машин
- Заключение
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.