Преимущества этого способа определения скольжения электродвигателя: быстрота измерений и возможность производить их как при неизменной, так и при изменяющейся частоте вращения. К недостаткам такого способа измерения можно отнести невысокую точность обычных тахометров (погрешность 1–8 %) и трудность их градуирования. Кроме того, тахометр не может применяться при испытании электродвигателей малой мощности, так как потери на трение внутри механизма тахометра представляют заметную нагрузку.
При наличии углубления по центру вала применяется удлинитель, который надевается на вал тахометра, а соответствующий наконечник – на удлинитель. При отсутствии или недостаточности центров пользуются шкивом, который прижимается боковой поверхностью (резиновым кольцом) к поверхности вращающегося вала.
В соответствии с конкретными условиями измерения выбирают приспособление (удлинитель наконечник). Перед началом измерения удаляют смазку, грязь, пыль из центра углубления или поверхности вала.
Для измерения частоты вращения электродвигателя следует предварительно установить на тахометре необходимый предел измерения. Если порядок измерения частоты неизвестен, то измерение следует начинать с самого высокого предела во избежание порчи тахометра.
Измерение следует производить кратковременно (3 – 5 с), осторожно прижимая наконечник тахометра к вращающемуся валу с небольшим нажимом так, чтобы ось вала тахометра совпадала с осью измеряемого вала или при пользовании шкивом была параллельной ей.
Если скольжение не превышает 5 %, частота вращения может быть измерена стробоскопическим методом с применением неоновой лампы.
На торце вала двигателя мелом наносят диаметральную черту. Во время работы двигателя ее освещают неоновой лампой, питаемой от сети той же частоты, что и двигатель. Наблюдатель видит на торце вала не черту, а звезду, медленно вращающуюся против направления вращения вала. Количество лучей звезды зависит от числа пар полюсов двигателя и от положения неоновой лампы. Если свет от обоих электродов лампы падает на торец вала, число лучей кажущейся звезды равно 2р. Если же торец вала с нанесенной меловой чертой освещается только одним электродом, число лучей кажущейся звезды равно числу пар полюсов.
За время t (обычно 30 с), измеряемое секундомером, подсчитывается количество лучей кажущейся звезды m, прошедших через вертикальное положение. Поскольку число лучей кажущейся звезды равно 2р, скольжение
где f1 – частота сети, питающей неоновую лампу.
Другой вариант стробоскопического метода заключается в следующем. На валу двигателя с торцовой стороны укрепляют один из дисков (рис. 2 ). Собирают схему (рис. 3 ). У двухполюсной машины на валу закрепляют диск, обозначенный как 2р = 2, и освещают его неоновой лампой с пятачковым электродом.
Ротор вращается несинхронно и отстает от поля, так что виден диск, медленно вращающийся в сторону, противоположную вращению ротора. Если за время t мимо неподвижной точки (стрелки, укрепленной на подшипнике) проходит m черных секторов, значение скольжения определяется по выражению
Счет проходящих мимо неподвижной точки секторов следует начинать не с момента пуска секундомера, а со следующего прохождения метки.
Определение скольжения двигателя с помощью индукционной катушки. Этот метод основан на контроле частоты вращения потоков рассеивания ротора Фр (рис. 5 ), которые с частотой, пропорциональной скольжению, пересекают витки индукционной катушки.
Рис. 5. Схема измерения скольжения ротора асинхронного электродвигателя с помощью индукционной катушки
К выводам катушки подключают чувствительный милливольтметр (желательно с нулем посредине шкалы); катушку располагают у конца вала ротора. Поворачивая катушку в разные стороны, находят положение, при котором наблюдаются максимальные колебания стрелки прибора. По числу полных колебаний k за время t рассчитывают значение скольжения
В качестве индукционной катушки можно использовать катушку реле или контактора постоянного тока, имеющую 10–20 тыс. витков (или намотать катушку с числом витков не менее 3000). Для усиления магнитного потока в катушку вставляют сердечник, набираемый из нескольких полос трансформаторной стали. Метод индукционной катушки весьма прост и пригоден для всех видов машин.
У асинхронных электродвигателей с фазным ротором помимо описанных выше способов скольжение может быть определено с помощью магнитоэлектрического амперметра, включаемого в одну из фаз ротора, а при наличии невыключаемого сопротивления в цепи ротора — с помощью вольтметра, присоединенного к кольцам ротора. Рекомендуется применять приборы с двусторонней шкалой. Скольжение асинхронного электродвигателя рассчитывается по числу полных колебаний стрелки прибора, так же как при использовании метода с индукционной катушкой.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Как определить скольжение асинхронного двигателя в процессе наладки и эксплуатации
Достоинства этого метода определения скольжения электродвигателя: быстрота измерений и возможность создавать их как при постоянной, так и при изменяющейся частоте вращения. К недочетам такового метода измерения можно отнести невысокую точность обыденных тахометров (погрешность 1–8 %) и трудность их градуирования. Не считая того, тахометр не может применяться при испытании электродвигателей малой мощности, потому что утраты на трение снутри механизма тахометра представляют приметную нагрузку.
При наличии углубления по центру вала применяется удлинитель, который надевается на вал тахометра, а соответственный наконечник – на удлинитель. При отсутствии либо дефицитности центров пользуются шкивом, который прижимается боковой поверхностью (резиновым кольцом) к поверхности вращающегося вала.
В согласовании с определенными критериями измерения выбирают приспособление (удлинитель наконечник). До измерения убирают смазку, грязь, пыль из центра углубления либо поверхности вала.
Для измерения частоты вращения электродвигателя следует за ранее установить на тахометре нужный предел измерения. Если порядок измерения частоты неизвестен, то измерение следует начинать с самого высочайшего предела во избежание порчи тахометра.
Как определить скольжение асинхронного двигателя в процессе наладки и эксплуатации
Скольжение асинхронного двигателя
— относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
где n — скорость вращения ротора асинхронного двигателя, об/мин
n 1 > — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор
состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор
состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
Принцип работы асинхронного двигателя.
Во время подачи напряжения к обмотке в любой из фаз создаётся магнитный поток. Он меняется параллельно частоте подаваемого напряжения. Данные магнитные потоки смещены на 120 градусов во времени и пространстве касательно друг друга. Вместе с тем, результирующий магнитный поток в действительности оказывается вращающимся. В проводниках ротора результирующий магнитный поток статора при вращении создает ЭДС. В обмотке ротора есть замкнутая электрическая цепь, в которой возникает ток. Тем временем ток при взаимодействии с магнитным потоком статора образовывает пусковой момент двигателя, что стремится направить ротор в том направлении, в котором вращается магнитное поле статора. Когда он превысит значения тормозного момента ротора, ротор придет в действие. В этот момент возникает скольжение.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
СКОЛЬЖЕНИЕ РОТОРА
Ротор асинхронного двигателя всегда должен отставать от вращающегося магнитного потока. Скорость вращения потока принято означать п
1,она постоянна, так как р =
const и
f
1 = const. Скорость вращения ротора можно обозначить
п
2. Величина называется скольжение м.
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2
= 0, а если вообразить, что ротор вращается синхронно с потоком, п2
=
п
1.Чем больше нагрузка на валу, тем больший тормозной момент должен уравновеситься большим вращающим моментом. Последнее возможно только при увеличении
I
2, а значит, и
Е2.
Как будет показано ниже,
Е2
увеличивается при уменьшении
n
2, т. е. при увеличении
s
.Таким образом, при увеличении нагрузки на валу скорость ротора
п
2уменьшается. Скольжение при номинальной нагрузке
S
н у асинхронных двигателей равно от 1 до 6%; меньшая цифра относится к мощным двигателями
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Устройство асинхронного двигателя
В промышленных масштабах производиться несколько видов асинхронных электрических машин. Они могут отличаться местом установки обмоток, способом их укладки, мощностью, типом ротора и т.д. В качестве примера мы рассмотрим наиболее типовое устройство. Конструктивно асинхронный двигатель состоит из таких компонентов:
Устройство асинхронного двигателя
Но, следует отметить, что это лишь один из видов таких двигателей, на практике вы можете встретить электрические машины с короткозамкнутым или фазным ротором. Также распространенной конструкцией является беличья клетка в алюминии.
Основные типы асинхронных двигателей
Основные типы асинхронных двигателей
Кроме подразделения по признаку, разделяющему двигатели в зависимости от устройства ротора на короткозамкнутый или фазный, электродвигатели делятся по конструктивным признакам, базового и модифицированного изготовления.
В базовое исполнение входят электродвигатели монтажного IM1001 (1081) или климатического УЗ, для работы в режиме S1, исполнения с требуемыми стандартами по ГОСТ.
В модифицированном исполнении присутствуют некоторые конструктивные отличия, соответствующие особенностям монтажа, усиленной степени защиты, характерному климатическому исполнению, предназначенные для использования в определенном регионе.
Асинхронные двигатели высокой мощности, со степенью защиты характерной для закрытого электродвигателя, от попадания влаги и брызг, IP23 — 4А, 5А
Взрывозащищенные двигатели, используемые для предприятий первой категории по электробезопасности.
АД специального предназначения, используются в узкоспециализированном профиле, например, для лифтов, подъемных механизмов, транспорта.
Энергоэффективные асинхронные электродвигатели
Изготовление двигателей для специальных и строго определенных условий эксплуатации, положительно сказывается на энергосбережении, это позволяет адаптировать электродвигатель к определенному электроприводу, что позволяет достичь наибольшего коэффициента экономической эффективности при эксплуатации. Проектирование асинхронного электродвигателя к регулируемому электроприводу обеспечивает эффективное энергосбережение.
Энергоэффективность достигается, за счет увеличения длины сердечника статора, без изменения величины и геометрии поперечного сечения, а также за счет уменьшения количества витков статорной обмотки для электропривода с возможностью регулирования. В результате получается значительное энергосбережение.
Источник
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
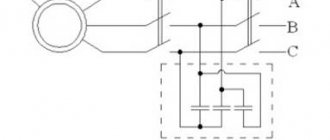
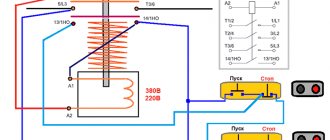
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
— разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
— разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность: S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых
трехфазных машин согласно
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Скольжение — асинхронный двигатель
Динамические характеристики нагрузки определяют изменение скольжения асинхронных двигателей при данном значении напряжения для различных моментов времени. По заданным значениям скольжения определяются активные и реактивные сопротивления схемы замещения асинхронной нагрузки.
Из (2.21) следует, что с увеличением скольжения асинхронного двигателя, т.е. с уменьшением частоты его вращения за счет увеличения нагрузки, ток ротора возрастает и достигает наибольшего значения при s1, т.е. когда ротор находится в неподвижном состоянии. Одновременно с ростом скольжения увеличивается индуктивное сопротивление ротора X1S — Es, благодаря чему ток ротора по мере роста скольжения увеличивается менее заметно, чем ЭДС.
Перепад скорости в относительных единицах Av аналогичен скольжению асинхронного двигателя, хотя скольжение для двигателей постоянного тока не имеет того физического смысла, как у асинхронных двигателей.
| Схема регулирования частоты вращения с тиристорным регулятором напряжения.| Реверсивная схема регулирования частоты вращения асинхронных двигателей.| Электромеханический каскад.| Электрический каскад. |
В электрическом каскаде ( рис. 3.75) мощность скольжения асинхронного двигателя АД после преобразователя снова подается на двигатель постоянного тока ДПТ, на валу которого находится синхронный генератор СГ. Синхронный генератор отдает электрическую энергию в сеть. В этой схеме мощность скольжения отдается в сеть.
В свою очередь, пульсирующее напряжение увеличивает среднее значение скольжения асинхронных двигателей, что приводит к увеличению времени прохождения ими максимума нагрузки и к дополнительным потерям мощности в двигателях. Увеличение скольжения вызывает снижение числа качаний, а следовательно, и добычи как отдельных установок, так и всего промысла. Кроме того, наличие частых провалов в кривой напряжения приводит к затягиванию и без того тяжелого для сети процесса пуска двигателей скважинных насосных установок.
В асинхронно-синхронном каскаде момент синхронного двигателя Мед определяется мощностью скольжения асинхронного двигателя.
| Модификации каскада постоянной мощности. |
Суть применения указанных машин и аппаратов сводится к тому, что энергия скольжения асинхронного двигателя при регулировании скорости возвращается на вал двигателя или в сеть, так же как это было при одноякорном преобразователе.
При переходе каскада через синхронную скорость концы и начала обмотки возбуждения В должны поменяться местами соответственно изменению знака скольжения асинхронного двигателя.
| Характеристика асинхронного двигателя. |
При такого рода расчетах для каждого интервала времени необходимо определять новые значения активных и реактивных сопротивлений нагрузок в соответствии с изменением скольжения асинхронных двигателей.
Метод относительных единиц получил широкое распространение; он применяется в теории электрических машин и теории электропривода, выражение в относительных единицах величин сопротивления электрических машин и трансформаторов, скольжения асинхронных двигателей, напряжения к.
Увеличение напряжений в сети приводит к росту суммарной активной нагрузки в системе за счет роста бытовой нагрузки, мощность которой сильно зависит от напряжения, и за счет снижения скольжения асинхронных двигателей, хотя потери мощности в сети уменьшаются. В связи с увеличением активной нагрузки рост напряжений приводит к снижению частоты, которое при наличии резерва активной мощности может быть предотвращено действием автоматических регуляторов частоты. Снижение напряжений аналогичным образом приводит к снижению активной нагрузки в системе и, следовательно, к повышению частоты. При дефиците активной и реактивной мощностей в послеаварий-ном режиме снижение напряжений до некоторой степени предотвращает резкое снижение частоты.
Механическая характеристика асинхронного двигателя
Механическая характеристика асинхронного двигателя это зависимость частоты вращения вала двигателя от момента на его валу n
2=
f
(
M
) или
S
=
f
(
M
). Механическая характеристика изображена на рис. 13. На характеристике можно выделить четыре характерные точки:
1 Точка идеального холостого хода. В ней М
=0,
S
=0;
2 Точка номинального режима работы. В ней М=МН
,
S=SН
. Значения
n
2
Н
и
МН
можно определить по каталожным данным двигателя;
3 Точка максимального или критического момента. В ней М=Мm
,
S=SK
. Данная точка характеризует перегрузочную способность двигателя.
| Рис. 13 |
В каталогах для определения параметров данной точки приводится величина кратности критического момента двигателя:
.
Величина кратности позволяет определить максимально возможный момент двигателя.
4. Точка пуска. В ней М=МП
,
S
=1. Данная точка характеризует пусковые свойства двигателя. В каталогах для определения пусковых свойств приводится величина кратности пускового момента двигателя:
.
В каталогах приводится также коэффициент кратности пускового тока
который позволяет определить величину тока двигателя в момент пуска.
Синхронные машины
Синхронные машины как двигатели применяются обычно в приводах большой мощности (более 600 кВт) или как микродвигатели, где требуется строгое постоянство скорости: электрочасы, самопишущие приборы и др. Наибольшее распространение получил генераторный режим работы синхронных машин, и почти вся электроэнергия вырабатывается синхронными генераторами, часто называемыми турбогенераторами
. Синхронные генераторы на напряжение до 1000 В применяются в агрегатах для автономных систем электроснабжения. Агрегаты с этими генераторами могут быть стационарными и передвижными. Большинство агрегатов применяются с дизельными двигателями, но приводом их могут быть газовые турбины, электродвигатели и бензиновые двигатели.
Схема синхронной машины показана на рис. 14. Синхронная машина отличается от асинхронной тем, что ток в обмотке ротора появляется не при вращении ее в магнитном поле статора, а подводится к ней от постороннего источника постоянного тока. Статор синхронной машины выполнен так же, как и асинхронной, и на нем обычно расположена трехфазная обмотка. Обмотка ротора в синхронной машине создает магнитный поток возбуждения и называется обмоткой возбуждения
. Вращающаяся обмотка ротора соединяется с внешней цепью источника постоянного тока с помощью контактных колец и щеток. Обмотка
якоря
в машине (генераторе) — это обмотка, в которой индуцируется ЭДС и к которой присоединяется нагрузка.
Рис. 14. Схема синхронной машины:
В — обмотка возбуждения, Uв — напряжение В цепи возбуждения
Результирующий магнитный поток создается совместным действием обмоток возбуждения и статора и вращается с той же частотой, что и ротор, поэтому такие машины называются синхронными.
В схеме на рис. 14 статор является якорем, а ротор — индуктором (возбудителем), но может быть и обращенная схема, в которой статор — индуктор, а ротор — якорь как у машины постоянного тока.
В машине с неподвижным якорем применяются две разновидности ротора: явнополюсный ротор
имеет явно выраженные полюсы,
неявнополюсный ротор
не имеет явно выраженных полюсов.
Рис. 15.Принцип устройства явнополюсной (а) и неявнополюсной (б)
синхронной машины
/ — статор (якорь), 2
— ротор (индуктор), 3 — обмотка возбуждения
Постоянный ток в обмотку возбуждения синхронной машины может подаваться от специального генератора постоянного тока, установленного на валу машины и называемого возбудителем, или от сети через полупроводниковый выпрямитель.
При вращении ротора с частотой n2 его магнитное поле возбуждения наводит в статоре ЭДС E1, частота которой
f1
=p*n2/60
Из формулы следует, что чем больше число пар полюсов синхронной машины p*,
тем меньше должна быть ее скорость вращения
п
для получения заданной частоты
fi.
Поэтому синхронные генераторы обычно выпускают явнополюсными с большим числом пар полюсов.
Синхронный двигатель несколько сложнее, чем асинхронный, кроме того, требуются два вида тока – переменный и постоянный. Такие двигатели обычно выпускаются большой мощности и имеют большие габариты. Синхронные двигатели имеют проблемы пуска, обусловленные введением ротора в синхронный режим при запуске двигателя. Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через автотрансформатор. При асинхронном пуске в момент включения (подключения обмоток статора к системе трехфазного тока) обмотки ротора не соединены с источником постоянного тока, а замкнуты накоротко. Двигатель при этом становится по принципу действия асинхронным. После разгона ротора его замкнутые обмотки размыкаются и подключаются к источнику постоянного тока.
Вместе с тем синхронный двигатель обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного.
1. Основным достоинством синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии
, который осуществляется путем автоматического регулирования тока возбуждения двигателя. Синхронный двигатель может работать, не потребляя и не отдавая реактивной энергии в сеть, при коэффициенте мощности (cos фи) равным единице. Если для предприятия необходима выработка реактивной энергии, то синхронный электродвигатель, работая с перевозбуждением, может отдавать ее в сеть.
2. Синхронные электродвигатели менее чувствительны к колебаниям напряжения сети, чем асинхронные электродвигатели. Их максимальный момент пропорционален напряжению сети, в то время как критический момент асинхронного электродвигателя пропорционален квадрату напряжения.
3. Синхронные электродвигатели имеют высокую перегрузочную способность. Кроме того, перегрузочная способность синхронного двигателя может быть автоматически увеличена за счет повышения тока возбуждения, например, при резком кратковременном повышении нагрузки на валу двигателя.
4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности.
Механическая характеристика синхронного электродвигателя.
Критическое скольжение[править | править код]
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.