DIRECT SMOOTH STAR-DELTA THROUGH CONVERTER
Due to their extreme simplicity, asynchronous electric motors with a squirrel-cage rotor are widely used, especially in three-phase networks, where they do not require additional starting or phase-shifted windings.
With proper operation, an asynchronous electric motor becomes almost eternal - the only thing in it that may require replacement is the rotor bearings.
However, a number of features of asynchronous motors determine the specifics of their starting mode: the absence of an armature winding means the absence of induction back-EMF at the moment the stator windings are turned on, and therefore a high starting current.
While this is not critical for low-power electric motors, in industrial electric motors starting currents can reach very high values, which leads to voltage drops in the network, overloading substations and electrical wiring.
DIRECT START OF AN INDUCTION MOTOR
As mentioned above, direct connection of the winding of an asynchronous motor can only be used at low power. In this case, the starting current exceeds the rated current by 5-7 times, which is not a problem for switching equipment and electrical wiring.
The main problem with direct starting is connecting several electric motors to a low-power substation or generator.
Connecting a new electric motor to the network can cause such a strong voltage drop that the already running motors will stop, and the new motor will not have enough starting torque to get going.
The starting current of an asynchronous motor reaches its maximum value at the moment of switching on and gradually decreases to the nominal value as the rotor spins up.
Therefore, to reduce network overload time, the induction motor should be started with a minimum load, if possible.
Powerful lathes and guillotines for cutting metal do not have friction clutches, and all their rotating mechanisms spin up when the electric motor is turned on.
In this case, long-term voltage sags have to be directly included in the power supply designed for them.
Methods of starting asynchronous electric motors. Advantages and Disadvantages (2008)
In modern production, electric motors of various types are used. But the most widely used are asynchronous electric motors with a squirrel-cage rotor. They are relatively cheap and generally require low operating and maintenance costs.
For different manufacturers, the starting parameters of asynchronous electric motors can differ significantly with the same rated power. The use of reduced voltage starting systems assumes that the motor has a high starting torque at direct start (DOL). In this case, the starting current and starting torque are reduced. The technical characteristics are also influenced by the number of poles: an electric motor with two poles often has less starting torque than electric motors with four or more poles (Fig. 1a and 1b).
Voltage
Three-phase single-speed motors can be used on two voltages. The three phase windings of the stator are connected in star (Y) or delta (D) (Fig. 2a and 2b).
Phase windings can be connected in series or in parallel, for example, Y or YY. On the nameplate of an electric motor with a squirrel cage rotor, the voltages for a star or delta connection are indicated, that is, the electric motor can be connected to voltages of 230 V or 400 V. The windings are connected in a delta for 230 V, and when used The 400 V supply voltage uses a star connection. When changing the supply voltage, remember that with the same rated power, the current will depend on the voltage.
Power factor
An electric motor always consumes active power, which is converted into mechanical work. To magnetize the active steel of the stator and rotor, reactive power is required, which is parasitic. In the diagram, active and reactive power are represented as P (active) and Q (reactive), which together produce power S (apparent). The relationship between active power (kW) and reactive power (kVA) is called power factor and is denoted as cos9. The normal value of this coefficient lies in the range of 0.7-0.9, while small electric motors have a low value of this parameter, and powerful ones have a high value.
Speed
The speed of an AC motor depends on two parameters: the number of poles of the stator winding and the frequency of the supply voltage. At a frequency of 50 Hz, the electric motor will operate at a speed constant equal to 6000 rpm divided by the number of poles, and at a frequency of 60 Hz, the constant will be equal to 7200 rpm.
Torque
The starting torque of the motor depends on the power of the electric motor. For small electric motors up to 30 kW, it is 2.5-3 times the rated torque. For electric motors with power up to 250 kW, the typical value is 2-2.5 times the rated torque. More powerful electric motors have even less starting torque, sometimes even less than the rated one. It is impossible to start such an electric motor under load even by starting a direct voltage supply.
Direct voltage start
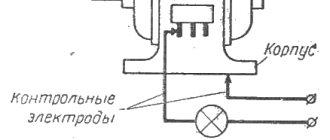
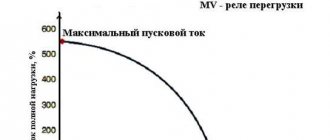
This method is one of the most common methods of starting electric motors. The starting equipment consists of a main contactor and a thermal or electronic overload relay. The disadvantage of this method is the highest starting current, which exceeds the rated current by 6-7, and in some cases 10-12 times. In addition to the starting current, a pulse current occurs that exceeds the rated current by 14 times. These values depend on the design and size of the electric motor, with less powerful electric motors having higher relative starting and pulse currents. When starting with direct voltage supply, the starting torque is also very large and in most cases more than necessary, which leads to wear and failure of the driven equipment.
Start by switching the star-delta connection
This method reduces the starting current and starting torque. The starting device usually consists of three contactors, an overload relay and a timer that sets the time in the starting position. To use this starting method, the delta-connected stator windings of the electric motor must be designed to operate at rated speed. In this case, the starting current is about 30% of the starting current that occurs when starting with direct voltage supply, and the starting torque is 25% less than that that occurs when starting with direct voltage supply (Fig. 3a, 3b and 3c).
Frequency converters and soft start systems
The development of the element base has made it possible to create new classes of equipment for controlling the operation of an electric motor. Frequency systems and soft start systems have been created, which differ in purpose and operating principle.
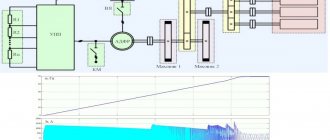
Frequency converters control the operating mode of the electric motor during the entire operating period, monitoring the main electromechanical parameters. The principle of operation is based on the conversion of alternating current 50 Hz into direct current, and then using high-frequency modulation (PFM or PWM) the DC voltage is converted into alternating current with an adjustable frequency (Fig. 4 a). This allows you to control the operating mode of the electric motor by changing the frequency at the drive output. By controlling the frequency at start, the rated torque can be achieved at low speed. Another useful feature is the soft stop. This device also allows you to stabilize a user parameter when external characteristics change - for example, the pressure in the pipeline of a high-rise building is maintained unchanged regardless of consumption.
The operation of the soft start system is based on the principle of phase regulation, which makes it possible to minimize the starting current and torque at low voltage on the electric motor (Fig. 4 b). During the first stage of starting, the voltage supplied to the electric motor is so low that mechanical forces are minimal. Gradually, the voltage and torque increase, and the mechanisms begin to accelerate. One of the advantages of this starting method is the ability to accurately adjust torque, regardless of the presence of load. A special feature is the careful attitude towards the driven mechanism. Another function of the soft start system is soft stop.
Direct voltage start
It is carried out by supplying full voltage without subsequent switching. Characterized by maximum starting currents and impact on driven mechanisms. Suitable for low-power devices without special hardware requirements.
Star-delta starting
Provides reduced inrush current and reduced starting torque, which will ensure smooth acceleration of the equipment. This starting method allows you to start equipment in conditions of limited power supply, when the technical characteristics of the supply network do not allow starting with direct power supply
By the way, in the product range of TM IEK there is an automatic machine that allows you to solve the problem of starting an electric motor regardless of the switching circuit. These are KMI contactors in a shell. To implement a star-delta circuit, you need to use reversing starters, thermal relays and various types of additional equipment for them. A wide range of circuit breakers of the BA88-XX series is produced for frequency control and soft starting systems.
Equipment of the starting device using the example of TM IEK machines
The starting device consists of 2 power contactors of the KMI or KTI type (depending on the power of the electric motor) and an intermediate contactor KMI with a pneumatic attachment PVI, which allows you to obtain a time delay for the acceleration of the electric motor at start-up.
Star-delta starting
Starting is carried out when contactor K1 is activated (star-connected electric motor windings are connected to the supply network). The electric motor begins to accelerate.
Depending on the type of mechanism driven by the electric motor and the availability of the supply network, the time delay is adjusted on the PVI attachment installed on the intermediate contactor. After the time has elapsed, contactor K1 is turned off and contactor K2 is turned on, the motor windings switch to a delta connection, and the electric motor reaches the rated speed.
The circuit (Fig. 5) is designed taking into account production from standard components, minimizing costs and increasing the reliability of the final product. The completed device can be placed in a standard metal shell of a suitable size from the IEK TM range.
SOFT START OF AN INDUCTION MOTOR
A logical way to reduce the starting current was to reduce the voltage supplied to the stator at the time of starting, with its gradual increase as the engine accelerates.
The simplest and oldest method of soft starting is rheostat starting of an electric motor: several powerful resistors are connected in series to the stator circuit, which are sequentially short-circuited by contactors.
High inductance chokes (reactors), as well as autotransformers, can also be used.
This soft start method has obvious disadvantages:
Automation is problematic.
The operation of contactors is not tied to the real current value; they are either switched manually or switched automatically using a time relay.
Complicated starting under load.
Since the torque of an asynchronous motor is proportional to the square of the supply voltage, a 2-fold reduction in voltage at start-up will result in a 4-fold reduction in torque. The use of soft starting with electric motors directly connected to the load significantly increases the time it takes to reach operating speed.
Improvements in power electronics have made it possible to create compact automatic soft starters (also called soft starters from the English soft start) for asynchronous electric motors, installed on a standard mounting rail of electrical panels.
They provide not only smooth acceleration, but also engine braking, allowing you to adjust the start and stop current parameters in various modes:
Constant current limitation. At the moment of starting, the current is limited to a given excess of the rated value and is maintained at this value throughout the engine acceleration. Typically a limit of 200-300% of the rated current is used. The overload becomes insignificant, although its duration increases. Current generation. In this case, the current curve at the moment the engine is turned on has a greater slope, after which the softstarter goes into current limiting mode.
This soft start method is used when connecting to low-power substations or generators to reduce the starting load, however, the starting torque of the electric motor in this case is minimal. For devices that do not have an idling motor, it is impossible to use current generation with a flat starting curve.
Accelerated start (kick start). It is used with motors that directly drive the load, since otherwise their starting torque may be insufficient to start the rotor.
In this case, the soft starter allows a short-term excess of the starting current several times (in fact, direct switching is carried out); after a specified time, the current is reduced to two to three times the nominal value.
Freewheel stop. When the engine is turned off, the voltage from it is completely removed, and the rotation of the armature continues by inertia. The simplest switching method, applicable for low power and low drive inertia.
However, at the moment the circuit breaks, a strong inductive surge occurs, leading to strong sparking in the contactors. On powerful electric motors, as well as at high operating voltages, this shutdown method is unacceptable.
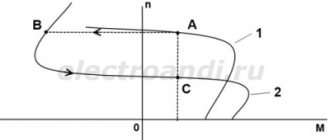
Linear voltage reduction. Used to stop the engine more smoothly. It must be remembered that the engine torque decreases nonlinearly due to the quadratic dependence of torque on voltage, that is, the decrease in torque occurs most sharply at the beginning of the curve.
Power is turned off at a minimum current in the winding; accordingly, the switching switches are practically not worn out by the formation of a spark between the contacts.
To reduce loads during shutdown, controlled voltage reduction is used:
- At first, the current decreases minimally;
- then the curve begins to decline steeper.
The reduction in electric motor torque is close to linear. This method of controlling the stopping of an electric motor is used in devices with high drive inertia.
When using this type of soft starter, commissioning work consists of setting the desired type of starting current curve and, in the case of using current generation or accelerated start modes, setting the duration of the time interval of the initial section of the curve.
The use of soft starters allows you to automate the starting mode, but its main disadvantage remains - either you have to build into the device the ability to idle the electric motor, or allow short-term network overloads by spinning up the motor and load with a kick start.
Methods for starting an asynchronous motor
Three-phase asynchronous motor (IM) is the main electrical
machine currently used in production. First of all, this is due to its low price, reliability and simplicity.
There are several ways to start AD.
The first method is direct start . The engine is started directly by supplying power to the stator winding. This method is the most economical, as it does not require additional devices to start. But, most often this method is used for low-power engines, since starting torques and currents with this method reach large values and can damage not only the engine itself, but also the mechanical drives connected to it.
Another method is the starting method with additional resistance in the stator circuit, the so-called rheostatic method . At the initial moment of time, there are rheostats in the stator circuit; when the supply voltage is applied, part of the voltage drops across them. Therefore, the engine starts at a reduced voltage, therefore, starting currents and torque are reduced to moderate values. The disadvantage of this method is the low starting torque, and therefore it is not recommended to use this method when starting under load.
The method of starting an asynchronous motor by switching from star to delta is used in installations where the load on the shaft is minimal or absent at all. In order to carry out this type of start, it is necessary that the main circuit for switching on the engine is a triangle. At the initial moment of time, the winding is connected according to a star circuit, starts up, accelerates to a certain value, and then switches to a delta. Thus, they achieve a reduction in currents at the time of start-up. But, as the currents decrease, the torques also decrease, which is why it is not recommended to use this method for a motor with a load on the shaft.
Another starting method is soft starting of an asynchronous motor . In this case, a soft start device (SPD), or soft starter, is connected to the stator winding. Using a soft starter, you can start and stop the engine without jerking. In addition, depending on the configuration of the soft starter, it may contain adjustment and protection functions. Of course, this starting method is the best for the machine itself and production mechanisms, because it extends the service life. But the cost of such a device varies widely and can often exceed the cost of the engine itself.
STAR-DELTA STARTING
Another starting method used on three-phase motors is recommutation of windings: at the moment of starting, the windings are connected in a star, and as the rotor accelerates, the windings are switched to normal connection in a triangle.
This starting method is actually a special case of the method of starting an asynchronous electric motor at a reduced voltage, since the voltage on the windings is reduced by approximately 1.73 times.
This starting method can be easily implemented using a set of manually controlled contactors or driven by a time relay, so it is quite cheap and widespread. The main disadvantages of this method:
- If one of the contactors fails, commutation will be disrupted, as a result of which either starting will become impossible or the engine power will be significantly reduced.
- The voltage and current reduction are fixed.
- The engine torque decreases when the windings are turned on with a star, so it is also advisable to start it without load.