16.03.2020
- Servo drive - what is it?
- Servo motor device
- How does a servo drive work?
- Types of servos
- Applications of servos
- Features of AC Servo Drive Device
- Advantages and disadvantages
- Control Modes
- Recovery process
Let us turn to a mechanism that is installed in a number of machines and is actively involved in the automation of production processes. Let's consider what a servo drive means: the structure and principle of operation, circuits and areas of application - all these and other important points are in the focus of our attention. After reading the information, you will know what this power unit is, how it differs from other types, why and when it should be used.
Let’s clarify right away: its demand is not limited to the industrial sector; it is needed not only by equipment. It functions in heating appliances and air conditioning systems, in cars and even in amateur radio installations. Relevant wherever it is necessary to set movement and regulate acceleration or deceleration.
Servo drive - what is it?
This concept usually means a mechanism equipped with an electric motor that can be placed at the desired angle and locked in one position. But this definition is not comprehensive enough, so it can and should be supplemented.
This is also a power unit, controlled through negative feedback. It is the latter that makes it possible to sensitively control the specified movement parameters. And it simply must have a sensor - position, load, speed - and a control unit that maintains the necessary conditions automatically.
Among the most common today are models that maintain the set angle and/or intensity of the technological operation.
Servo motor device
In general, it has the following functional units:
- The drive itself is a motor that converts electrical energy into mechanical energy (rotation force); To reduce the speed to the required level, it is equipped with a gearbox that transmits torque.
- An encoder is a feedback sensor that converts the angle of rotation into a control signal that controls the rotation of the output shaft (a tool or some other organ for performing an action is attached to the latter). A potentiometer is also well suited for solving this problem; it changes its resistance when the slider moves, proportionally, and thereby ensures accurate positioning.
- The electronic filling that receives incoming parameters, reads and compares values, and performs on/off operations is also what the servo drive consists of; all EPEs are located on a printed circuit board, which helps maintain feedback and, in fact, is the most important part of the engine.
- Wiring - power connection (two cables) and delivery of a control signal (another), ensuring the correct position of the shaft, and therefore the tool used, is set.
This configuration is simple enough to ensure uninterrupted maintenance of modes and remain reliable. There is simply no such node that would become a “weak link”, so problems with operation arise relatively rarely. The duration of the resource is also facilitated by the specifics of functioning, the features of which we move on to.
Kinds
Rotary motion servo drives . Most often used in printing, packaging machines, and aircraft modeling. Are divided into:
- synchronous - make it possible to accurately set the degree of rotation (accurate to minutes of arc), speed, acceleration. They reach maximum speed faster than asynchronous ones, and are several times more expensive;
- asynchronous - allow you to accurately execute speed commands even at low speeds.
Linear motion servo drives . These devices can reach significant speeds (up to 70 m/s²), which makes them popular in automatic machines for mounting electronic parts on a printed circuit board. They are divided into flat and round models.
Servo drives are also classified according to the principle of operation: electromechanical, where movement is provided by a motor and gearbox, and electrohydromechanical, where a system of piston and cylinder operates. The second group of devices provides higher performance.
How does a servo drive work?
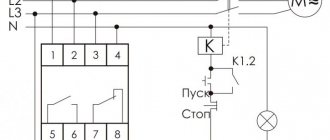
The principle of its operation is based on the use of a pulse signal, which has three key properties - frequency, shortest and highest duration, and it is the latter, that is, the length, that sets the angle of rotation. Can be in the range of 0.8-2.2 ms. As soon as it arrives on the printed circuit board, it activates the encoder (potentiometer) and, through a mechanical transmission, the output shaft.
An electronic circuit compares the actual position of the shaft with the programmed one. In this case, 3 states are possible. And the first of them is zero torque, that is, a complete coincidence, which means that the power unit does not work (stopped). With the second, the control signal is higher than the reference signal, this provokes a rotation in one direction, with the third, it is lower, which results in the movement of the rotating part in the other direction.
Thus, the principle of operation of the servomotor comes down to the following:
- the drive receives an input impulse, for example, a command to change the angle;
- the control unit correlates the received signal with the actual values taken by the sensor;
- Based on the results of the analysis, this board issues a command - movement along some vector, acceleration or deceleration - and is necessarily aimed at bringing the real figure to the given and necessary one.
The comparison is carried out on the basis of difference values and takes into account the duration parameter, and therefore determines the spread of indicators with maximum accuracy. This feature makes it possible to ensure the necessary positioning of the tool.
Servo drive composition
- drive - for example, an electric motor with a gearbox, or a pneumatic cylinder,
- feedback sensor - for example, gearbox output shaft rotation angle sensor (encoder),
- power supply and control unit (also known as frequency converter / servo amplifier / inverter / servodrive).
- input/converter/control signal/impact sensor (can be part of the control unit).
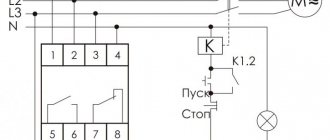
The simplest control unit for an electric servo drive can be built on a circuit comparing the values of the feedback sensor and the set value, with voltage of the appropriate polarity supplied (via a relay) to the electric motor. More complex circuits (on microprocessors) can take into account the inertia of the driven element and implement smooth acceleration and braking by an electric motor to reduce dynamic loads and more accurate positioning (for example, the head drive in modern hard drives).
To control servos or groups of servos, you can use special CNC controllers, which can be built on the basis of programmable logic controllers (PLC).
Motor power: from 0.05 to 15 kW. Torques (nominal): from 0.15 to 50 Nm.
Types of servos
They are classified mainly by the type of engine used, highlighting:
- synchronous - characterized by a rapid increase in speed, as well as precision rotation;
- asynchronous - their key feature is the high stability of the shaft behavior;
- universal - equipped with a commutator power unit, either AC or DC.
The former are especially in demand in the automotive industry and are actively installed in automatic transmissions for trouble-free gear shifting. They are also relevant for special equipment transporting loads weighing over 100 kg. The second and third ones are more focused on various industrial equipment.
If we take a comprehensive look at a servomotor - what it is, its operating principle, its types - then we need to pay attention to its main operating parameters. The list of key characteristics of all its models:
- torque (force created) - must be written down in the passport, and in two quantities at once, for different supply voltages;
- option of the supplied pulse, because it can be controlled using both a digital and analog signal;
- speed - determines the time during which the shaft moves (clockwise or counterclockwise) 60 degrees;
- supported rotation angle - usually it is either 180 0 (half cycle) or 360 0 (full); although today there are modified models in which the rotation is continuous;
- material for the gears – it can be plastic, carbon, brass or composite;
- voltage - varies in the range from 4.8 to 7.2 V (for the main group of power units);
- wire colors and pinouts are usually all standard: black – general, red – power, white (yellow or brown) – control.
A few more nuances: the design of the servomotor may require the presence of a motor with a core. This is not the best option, since during its operation vibrations appear, which reduce the accuracy of shaft rotation. Therefore, it is more practical to choose models in which the kinetic energy of the rotor will be minimal in practice, even though they are somewhat more expensive. This is especially true in cases with the operation of CNC machines that produce complex parts.
And a few words about the gearbox: it can be gear or worm. The first one is more in demand today, as it is more affordable and quite effectively reduces the rotation speed, providing the required torque. The second, despite the better gear ratio, is produced and is less common, since its production results in more serious costs.
Another important factor in the difference between types is overall dimensions, namely the LxWxH ratio and weight. In accordance with them, three groups of power units are distinguished:
- small – 22 by 15 by 25 mm and up to 25 g;
- standard (medium) – 40 by 20 by 37 mm and up to 80 g;
- large – 49 by 25 by 40 mm and up to 90 g.
The next difference is in the interface:
- analog – pulses are processed by a microcircuit;
- digital – signals are read by the processor.
When deciding what a servo drive is needed for, remember that the nuances are in the filling, but the external design can be absolutely the same.
Also, the variety of models can be divided according to the material of the gears - into the following groups:
- with plastic (nylon) - lightweight, resistant to wear, but not to heavy loads;
- with carbon ones - more durable, not having significant weight, but also costing several times more than the previous ones;
- with metal (brass, titanium) - heavy, withstanding even the most serious torque, but rubbing against each other.
And finally, there are options with and without a core (collector). The first ones have a hollow rotor in several sections, between which vibration appears during rotation. Therefore, they are less accurate than those whose moving part is hollow, and they are also heavier and provide a longer response, although they are cheaper.
Main characteristics of the product
The operation of a servo drive is characterized by two main indicators: the speed of rotation and the force on the shaft. The first value serves as an indicator of time, which is measured in seconds. The force is measured in kg/cm, that is, what level of force the mechanism develops from the center of rotation.
In general, this parameter depends on the main purpose of the device, and only then on the number of gearbox gears and the components used in the device.
As already mentioned, mechanisms are now produced that operate at a supply voltage of 4.8 to 6 V. More often, this indicator is 6 V. However, not all models are designed for a wide range of voltages. Sometimes the servo motor operates at only 4.8 V or only at 6 V (the latter configurations are extremely rare).
Applications of servos
Today they are widely used in a variety of fields:
- in robotics and the creation of manipulators; to control them, in turn, they use Arduino hardware and software;
- to implement a heated floor system - they help to automatically regulate the temperature, lowering or raising it as needed;
- in the automotive industry - for integration with locks, supplying fluid to the heater, changing gears in automatic transmissions;
- in cargo equipment - they set the modes of gripping, lifting, transporting, lowering and releasing objects of very different weights and dimensions.
These are not all possible areas and niches - these power units, in fact, are relevant wherever it is necessary to precisely control the movement of the shaft.
Features of AC Servo Drive Device
This is a subtype of the synchronous model, in which the rotor rotates at the same frequency as is inherent in the magnetic field created by the stator windings. Three-phase voltage is sent to the latter, starting the entire functioning process.
An encoder is attached to the moving part, the resolution of which is relatively high. One signal is sent from it to the first input, and another signal is sent from the electronic board to the second. This pair is compared, and the difference between them is an indicator of mismatch, based on which it is necessary to set a command to supply the appropriate voltage for the earliest possible occurrence of zero torque.
When reading about how the model works, in the technical literature you can often come across the term “servo amplifier”: what is it? This board is a control unit, and we have already found out what it is and what it is needed for, so don’t be afraid of the new definition.
Advantages and disadvantages
The power units under consideration have a whole set of features, and, if we compare them with stepper ones, a number of advantages can be identified.
Among the objective advantages:
- accurate, often even precision positioning;
- rapid increase in torque and decrease in speed through the use of a gearbox;
- trouble-free correction - changes can be made to the program in a matter of minutes by adjusting the movement of the working tool according to the first practical results obtained;
- excellent tolerance to physical, temperature and other stresses for a long time of non-stop operation;
- development of significant accelerations, ensuring excellent compatibility with high-speed equipment, for example, with universal machines from Izhevsk;
- maintaining uniform torque throughout the entire operating range.
The use of a servo drive is not total only because it also has some disadvantages.
In the list of relative minuses:
- in the presence of plastic gears or soft metal parts, the gearbox becomes a “weak link” that fails under intense impacts;
- resistive tracks wear out in a relatively short time (relevant for models with a potentiometer);
- such a power unit is more expensive than a stepper unit;
- A program suitable for high accuracy often turns out to be difficult to set up in practice.
It is clear that benefits have a much more important impact and are responsible for a significant degree of demand in a variety of areas.
Areas of use of the device
In the modern world, when automation has taken a strong position in all areas of mechanical engineering, the design of all mechanisms has become noticeably unified. In this case, modern individual drives are used.
In order to understand what a servo drive is, you should know the scope of application of the device.
The devices contain precision designs for maintaining speed in industrial robots and machine tools with high precision. They are mounted on drilling equipment, in various transport systems and auxiliary mechanisms.
The devices are most widely used in the following areas:
- production of paper and packaging;
- production of metal sheets;
- materials processing;
- production of transport equipment;
- wood processing industry;
- production of building materials.
Control Modes
Servo operation can be carried out in three different formats. Let's look at each of them.
Position control
Here you need to maintain a given angle of rotation of the shaft by giving a sequence of signals. Let them come from the controller - this way, precise positioning can be ensured, which is especially important for production machine components.
Please note that using a set of impulses, it is not a problem to specify information not only about the position in space, but also about the rotation vector or speed of movement. This can be done in one of three ways - by directing the voltage:
- with a phase shift of 90 degrees;
- to two inputs at once (SIGN, PULSE - standard names);
- moving clockwise or counterclockwise.
Speed control
Here, servo control is an increase or decrease in the analog signal by a discrete amount when it is applied to the corresponding windings. And if it is also multi-polar, then it is not difficult to quickly change the direction of rotation.
This mode resembles the operation of an asynchronous power unit with a frequency converter. Because within its framework it is necessary to constantly perform acceleration and deceleration, set minimums and maximums, and the like. The main thing is to implement a not too complex algorithm, so as not to turn an ordinary practical task into an overwhelming programming task.
Torque control
In this case, the purpose of the servo is to provide a stable speed, regardless of whether the motor is spinning or not. This goal is achieved by supplying either a discrete signal or an analog bipolar one. The method is more than relevant for equipment that requires a change in pressure, pressure or other parameters during operation.
Attention, the power unit must be additionally equipped with a built-in current sensor, because it is the latter that evaluates the value of the current torque, so that the electronics can then compare it with the required value.
Servo
Another option for precise positioning of driven elements without a feedback sensor is the use of a stepper motor. In this case, the control circuit counts the required number of pulses (steps) from the reference position (this feature is due to the characteristic noise of the stepper motor in 3.5″ and CD/DVD drives when attempting to read again). In this case, accurate positioning is ensured by parametric systems with negative feedback, which are formed by the corresponding poles of the stator and rotor of the stepper motor interacting with each other. The stepper motor control system, activating the corresponding stator pole, generates a reference signal for the corresponding parametric system.
Since a sensor usually controls the driven element, an electric servo drive has the following advantages over a stepper motor
:
- does not impose special requirements on the electric motor and gearbox - they can be of almost any required type and power (and stepper motors, as a rule, are low-power and low-speed);
- guarantees maximum accuracy by automatically compensating for: mechanical (play in the drive) or electronic drive failures;
- gradual wear of the drive; the stepper motor requires periodic adjustment for this;
- thermal expansion of the drive (during operation or seasonal), this was one of the reasons for switching to a servo drive for positioning heads in hard drives;
- ensuring immediate detection of failure (failure) of the drive (mechanical or electronic);
Disadvantages compared to a stepper motor
- the need for an additional element - a sensor;
- the control unit and the logic of its operation are more complex (processing of sensor results and selection of a control action are required, and the stepper motor controller is based on just a counter);
- fixation problem: usually solved by constant braking of the moving element or the electric motor shaft (which leads to energy losses) or the use of worm/screw gears (complicating the design) (in a stepper motor, each step is fixed by the motor itself).
- Servo drives are generally more expensive than stepper drives.
The servo drive, however, can be used on the basis of a stepper motor or in addition to it, to some extent combining their advantages and eliminating competition between them (the servo drive carries out rough positioning within the range of action of the corresponding parametric system of the stepper motor, and the latter carries out final positioning at a relatively large torque and position fixation).
PS:
There are no fixing problems with a servo drive, unlike a stepper drive. High-precision positioning and holding in a given position is ensured by the operation of the electric machine in valve mode, the essence of which boils down to its operation as a source of force. Depending on the position mismatch (and other coordinates of the electric drive), a force task is generated. At the same time, the undoubted advantage of the servo drive is energy efficiency: the current is supplied only in the amount necessary to keep the working element in a given position. This is in contrast to the step mode, when the maximum current value is supplied, which determines the angular characteristic of the machine. The angular characteristic of the machine is similar for small deviations to a mechanical spring, which tries to “pull” the working element to the desired point. In a stepper drive, the greater the position error, the greater the force at a constant current.
Recovery process
It often starts when switching operating modes of the servomotor: what is it? This is the return energy that is released when the sign (direction of movement) changes relative to the torque. Usually it is not too large, but it is still collected on the capacitors, thus increasing the voltage on the DC link.
In those cases when this inequality of absolute values reaches a serious level, the threshold level of bus capacity will be broken. And then all excess will be dumped into the braking resistor.
We tried to consider all the features of these mechanisms and emphasize the convenience and prospects of their use. We also suggest taking a look at servo drive diagrams, photos and videos on this topic so that you can complete your idea.