How does an electric motor work?
The engine operates based on an effect discovered by Michael Faraday back in 1821. He made the discovery that when an electric current in a conductor interacts with a magnet, continuous rotation can occur.
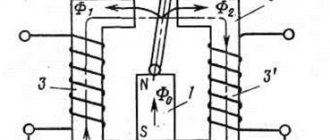
If a frame is placed in a vertical position in a uniform magnetic field and a current is passed through it, then an electromagnetic field will arise around the conductor, which will interact with the poles of the magnets. The frame will repel from one, and attract to the other.
As a result, the frame will rotate to a horizontal position, in which the effect of the magnetic field on the conductor will be zero. In order for the rotation to continue, it is necessary to add another frame at an angle or change the direction of the current in the frame at the appropriate moment.
In the figure, this is done using two half-rings, to which the contact plates from the battery are adjacent. As a result, after completing a half-turn, the polarity changes and the rotation continues.
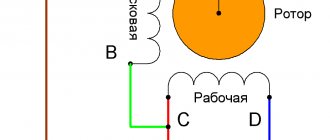
Modern electric motors use inductors or electromagnets to create a magnetic field instead of permanent magnets. If you disassemble any motor, you will see wound turns of wire coated with insulating varnish. These turns are the electromagnet or, as they are also called, the field winding.
In everyday life , permanent magnets are used in battery-powered children's toys.
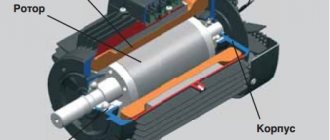
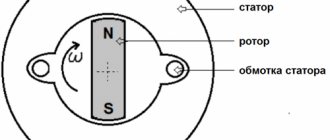
Other more powerful motors use only electromagnets or windings. The rotating part with them is called the rotor, and the stationary part is the stator.
Design, principle of operation and connection of AC electric motors
AC motors are electrical devices that convert electrical energy into mechanical energy. Electric motors are widely used in many industries to drive all kinds of machines and mechanisms. Without such equipment, the operation of washing machines, refrigerators, juicers, food processors, fans and other household appliances is impossible.
According to the principle of operation, AC electric motors are divided into synchronous and asynchronous. Asynchronous AC electric motors are most often used in industry.
It is worth considering the design of an asynchronous AC electric motor.
This type of electric motor consists of main parts - a stator and a rotor. In modern asynchronous electric motors, the stator has implicit poles.
In order to minimize losses from eddy currents, the stator core is made of an appropriate thickness of sheets of electrical steel that have been stamped. A winding of copper wire is pressed into the stator slots. The stator phase windings of the device can be connected in a star or delta. In this case, all the beginnings and ends of the pressed-in electric motor windings are brought out onto the housing - into the terminal box. Such a device for the stator of an electric motor is justified, since it makes it possible to switch its windings to different standard voltages. The stator core is pressed into a cast iron or aluminum housing.
The rotor of an asynchronous motor also consists of stamped sheets of electrical steel, and windings are placed in all its grooves.
Taking into account the rotor design, asynchronous electric motors are divided into devices with a squirrel cage rotor and a wound rotor.
The squirrel-cage rotor winding, made of copper rods, is placed in the slots of the rotor. In this case, all ends of the rods are connected using a copper ring. This winding option is considered a “squirrel cage” winding. It is worth noting that the copper rods in the rotor slots are not insulated. In many asynchronous electric motors, the “squirrel cage” is replaced by a cast rotor. The rotor is pressed onto the motor shaft and is one piece with it.
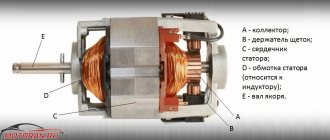
Synchronous electric motors are installed in various power tools, vacuum cleaners, and washing machines. On the body of an AC synchronous electric motor there is a pole core in which the windings are located. The field windings are also wound on the armature. Their leads are soldered to all sectors of the current collector, to which voltage is applied when using graphite brushes.
The operating principle of an AC electric motor is based on the application of the law of electromagnetic induction. When an alternating electric current interacts in a conductor and a magnet, continuous rotation can occur.
In a synchronous electric motor, the armature rotates synchronously with the electromagnetic field of the pole, while in an asynchronous electric motor the rotor rotates behind the rotating magnetic field of the stator.
For an asynchronous electric motor to operate, it is necessary that the rotor of the device rotates at a slower pace than the electromagnetic field of the stator. When current is supplied to the stator winding, an electromagnetic field arises between the stator and rotor cores, which induces an emf in the rotor. A rotating moment occurs and the motor shaft begins to rotate. Due to bearing friction or a certain load on the shaft, the rotor of an induction motor always rotates at a slower pace.
The operating principle of an asynchronous AC electric motor is that the magnetic poles of the device constantly rotate in the windings of the electric motor and the direction of the current in the rotor is constantly changing.
The rotor speed of an asynchronous electric motor depends on the total number of poles. In order to reduce the rotor speed in such a motor, it is necessary to increase the total number of poles in the stator.
In synchronous electric motors, the torque in the device is created by the interaction between the current in the armature winding and the magnetic flux in the field winding. When the direction of alternating current changes, the direction of the magnetic flux in the housing and armature simultaneously changes. With this option, the rotation of the armature will always be in one direction. It is noteworthy that the smooth regulation of the rotation speed of such electric motors is regulated by the magnitude of the supplied voltage, using a rheostat or variable resistance.
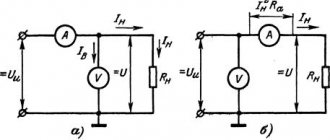
Depending on the network voltage, the stator phase windings of an asynchronous electric motor can be connected in a “star” or “delta” configuration. The circuit of an alternating current electric motor, when connected to a network with a voltage of 220 Volts, the windings are connected in a triangle, and when connected to a network of 380 Volts, the winding circuit has the shape of a star. To place an order, call the managers of the Kabel.RF® company by phone or send a request by email indicating the required electric motor model, purposes and operating conditions. The manager will help you choose the right brand, taking into account your wishes and needs.
Types of electric motors
Today there are quite a lot of electric motors of different designs and types. They can be divided by type of power supply :
- Alternating current , operating directly from the mains.
- Direct current , which operate from batteries, rechargeable batteries, power supplies or other direct current sources.
According to the principle of operation:
- Synchronous , in which there are windings on the rotor and a brush mechanism to supply electric current to them.
- Asynchronous , the simplest and most common type of motor. They do not have brushes or windings on the rotor.
A synchronous motor rotates synchronously with the magnetic field that rotates it, while an asynchronous motor rotates slower than the rotating magnetic field in the stator.
Operating principle and design of an asynchronous electric motor
in the housing of an asynchronous motor (for 380 Volts there will be 3 of them), which create a rotating magnetic field. Their ends are connected to a special terminal block for connection. The windings are cooled thanks to a fan mounted on the shaft at the end of the electric motor.
The rotor , which is one piece with the shaft, is made of metal rods that are closed to each other on both sides, which is why it is called short-circuited. Thanks to this design, there is no need for frequent periodic maintenance and replacement of current supply brushes, reliability, durability and reliability increase many times over.
As a rule, the main cause of failure of an asynchronous motor is wear of the bearings in which the shaft rotates.
Principle of operation. In order for an asynchronous motor to work, it is necessary that the rotor rotates slower than the electromagnetic field of the stator, as a result of which an EMF is induced (an electric current arises) in the rotor. An important condition here is that if the rotor rotated at the same speed as the magnetic field, then, according to the law of electromagnetic induction, no EMF would be induced in it and, therefore, there would be no rotation. But in reality, due to bearing friction or shaft load, the rotor will always rotate more slowly.
The magnetic poles constantly rotate in the motor windings, and the direction of the current in the rotor constantly changes. At one point in time, for example, the direction of currents in the stator and rotor windings is depicted schematically in the form of crosses (current flows away from us) and dots (current towards us). The rotating magnetic field is shown as a dotted line.
For example, how does a circular saw work ? It has the highest speed without load. But as soon as we start cutting the board, the rotation speed decreases and at the same time the rotor begins to rotate more slowly relative to the electromagnetic field and, according to the laws of electrical engineering, an even larger EMF begins to be induced in it. The current consumed by the motor increases and it begins to operate at full power. If the load on the shaft is so great that it stops, then damage to the squirrel-cage rotor may occur due to the maximum value of the EMF induced in it. That is why it is important to select an engine with suitable power. If you take a larger one, then the energy costs will be unjustified.
The rotation speed of the rotor depends on the number of poles. With 2 poles, the rotation speed will be equal to the rotation speed of the magnetic field, equal to a maximum of 3000 revolutions per second at a network frequency of 50 Hz. To reduce the speed by half, it is necessary to increase the number of poles in the stator to four.
A significant disadvantage of asynchronous motors is that they can adjust the shaft rotation speed only by changing the frequency of the electric current. And so it is not possible to achieve a constant shaft rotation speed.
Advantages and disadvantages of AC electric motors
Nowadays, among all electric motors, AC devices occupy a leading position in terms of volume of use in power plants. They have a low cost, easy-to-maintain design and an efficiency of at least 90%. In addition, their device allows you to smoothly change the rotation speed without resorting to additional equipment such as gearboxes.
The main disadvantage of AC motors with an asynchronous operating principle is the fact that their shaft rotation speed can be adjusted only by changing the input current frequency. This does not allow a constant rotation speed to be achieved and also reduces power. Asynchronous electric motors are characterized by high starting currents, but low starting torque. To correct these shortcomings, a frequency drive is used, but its price contradicts one of the main advantages of these motors - low cost.
The weak point of a synchronous motor is its complex design. Graphite brushes fail quite quickly under load, and also lose tight contact with the commutator due to weakening of the pressure spring. In addition, these motors, like their asynchronous counterparts, are not protected from wear of the shaft bearings. Disadvantages also include more complex starting, the need for a direct current source and exclusively frequency control of the rotation speed.