Angular velocity in sports
Angular velocity is often used in sports. For example, athletes decrease or increase the angular velocity of a golf club, bat, or racket to improve performance. Angular velocity is related to linear velocity such that of all the points on a segment rotating about a point on that segment, that is, about the center of rotation, the point furthest from that center moves at the highest linear speed. So, for example, if a golf club is spinning, the end of that club furthest from the center of rotation moves at the highest linear speed. At the same time, all points on this segment move with the same angular velocity. Therefore, by lengthening the club, bat, or racket, the athlete also increases the linear speed, and accordingly the speed of impact transmitted to the ball, so that it can fly a greater distance. Shortening the racket or club, even gripping it lower than usual, on the contrary, slows down the speed of the strike.
In the primitive communal system, men were the main hunters
Athletes with longer arms and legs achieve greater angular velocity
Tall people with long limbs have an advantage in terms of linear speed. That is, by moving their legs at the same angular speed, they move their feet at a higher linear speed. The same thing happens with their hands. This advantage may be one of the reasons that in primitive societies men hunted more often than women. It is likely that taller humans also benefited in the evolutionary process because of this. Long limbs helped not only in running, but also during hunting - long arms threw spears and stones with greater linear speed. On the other hand, long arms and legs can be an inconvenience. Long limbs have more weight and require additional energy to move them. In addition, when a person runs fast, long legs move faster, which means that when they collide with an obstacle, the impact will be stronger than for people with short legs who move at the same linear speed.
Gymnastics, figure skating and diving also use angular velocity. If an athlete knows the angular velocity, then it is easy to calculate the number of flips and other acrobatic tricks during a jump. During somersaults, athletes typically press their legs and arms as close to their body as possible to reduce inertia and increase acceleration, and therefore angular velocity. On the other hand, during a dive or landing, judges look at how smoothly the athlete lands. At high speeds, it is difficult to regulate the direction of flight, so athletes deliberately slow down the angular velocity by slightly extending their arms and legs away from the body.
Athletes who throw discus or hammer throw also control linear speed using angular speed. If you just throw the hammer without rotating it in a circle on a long steel wire that increases the linear speed, then the throw will not be as strong, so the hammer is first spun. Olympic athletes rotate on their axis three to four times to increase their angular velocity to the maximum possible.
Expressing linear velocity in terms of angular velocity
Speed is called instantaneous, since its value shows the magnitude of the speed at a certain point in time.
Since the displacement vector $\Delta \overline{r}$ is directed along the chord that connects two close points of the curvilinear trajectory of the particle, when the distance between these points decreases, the vector $\Delta \overline{r}$ takes the position of a tangent to the line, along which the particle moves. From definition (1) it follows that the instantaneous speed is directed tangentially to the trajectory of motion.
The speed of the path ($s$) is determined by:
\[v={\mathop{\lim }_{\Delta t\to 0} \frac{\Delta s}{\Delta t}=\frac{ds}{dt}\left(2\right).\ }\]
Instantaneous velocity is called linear when they want to emphasize its difference from angular velocity.
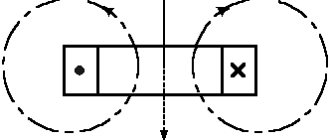
If a material point moves in a circle, then its position is characterized using the angle of rotation ($\varphi $), which forms a radius vector ($\overline{r}$), which determines the position of the point A under consideration with a selected constant direction from which the counting is made (Fig. 1).
The speed of change in the angle of rotation $\varphi $ is characterized using such a physical quantity as angular velocity. Typically, angular velocity is denoted by the letter $\omega$. Angular velocity is equal to:
\[\omega =\frac{d\varphi }{dt}\left(3\right).\]
Rotation is called uniform if the angular velocity is constant $\omega =const$. With uniform rotation, $\omega $ can be called the angular frequency.
The linear speed of a point moving around a circle is related to the angular speed. Let the point travel a path equal to the length of the arc XA (Fig. 1). Let's denote this path by $s$. If the radius of the circle is equal to $\ R=const$, then we find the length of the arc as:
\[s=R\varphi \ \left(4\right).\]
Let us differentiate both parts of expression (4) with respect to time, we have:
\[\frac{ds}{dt}=\frac{d\left(R\varphi \right)}{dt}=R\frac{d\varphi }{dt}\left(5\right).\]
We see that on the left side the linear velocity is obtained, on the right side the radius of the circle is multiplied by the angular velocity:
\[v=R\omega \left(6\right).\]
Formula (6) will be valid when a point moves along a curvilinear trajectory other than a circle, but in this case $R$ is the radius of curvature of the trajectory at the location of the particle.
In vector form, expression (6) is written as follows:
\[\overline{v}=\overline{\omega }\times \overline{r}\left(7\right),\]
$\overline{r}$ is a vector connecting the axis of rotation and the moving point (Fig. 2). Using formula (7), we find the velocity module as:
\[v=\omega r{\sin \alpha \ \left(8\right),\ }\]
where $\alpha $ is the angle between the angular velocity vector and $\overline{r}.$
Angular velocity and optical data storage
Disks in a hard disk drive (hard disk drive) spin at speeds ranging from 4,200 rpm on low-power portable devices to 15,000 rpm on high-performance servers
When data is written to optical media such as compact discs (CDs), the drive also uses angular and linear speeds to measure the speed at which the data is written and read. There are several ways to record data, which use variable or constant linear or angular velocity. For example, constant linear speed
(in English - Constant Linear Velocity or CVL) is one of the main methods of recording discs, in which data is written at the same speed over the entire surface of the disc.
When recording in Zone Constant Linear Velocity
(ZCLV) mode, a constant speed is maintained while recording on a specific part, that is, a zone of the disc.
In this case, the disc spins slower when recording on the outer zones. Constant Angular Velocity
mode allows you to record with a gradual increase in angular velocity until it reaches a certain threshold.
After this, the angular velocity becomes constant. The last recording mode is Velocity
(CAV) mode. In this mode, the same angular velocity is maintained over the entire surface of the disc during recording. In this case, the linear speed increases as the recording head moves further and further towards the edge of the disk. This mode is also used when recording records and computer hard drives.
Angular velocity.
Let's consider the uniform rotation of a point in a Cartesian coordinate system. Let's place the origin of coordinates at the center of the circle (Fig. 1).
| Rice. 1. Uniform movement in a circle |
Let be the initial position of the point; in other words, at the point had coordinates . Let the point turn through an angle and take position .
The ratio of the rotation angle to time is called the angular velocity of rotation of the point:
. (2)
Angle is typically measured in radians, so angular velocity is measured in rad/s. In a time equal to the rotation period, the point rotates through an angle. That's why
. (3)
Comparing formulas (1) and (3), we obtain the relationship between linear and angular velocities:
. (4)
Relationship between linear and angular velocity
Angular and linear speed are related mathematically. Linear velocity is the vector product of the angular velocity vector and the circle radius vector.
Note: The radius of a circle is a vector, it is directed from the center of the circle to its outer boundary.
Vector view:
\[\large \boxed{ \left[\vec{\omega}, \vec{R} \right] = \vec{v} }\]
Scalar form of recording the velocity relationship:
\[ \large \boxed{ \omega \cdot R = v }\]
\(\omega \left( \frac{\text{rad}}{c} \right)\) – angular velocity;
\(v \left( \frac{\text{m}}{c} \right)\) - linear speed;
\(R \left( \text{m}\right)\) – radius of the circle.
Angular velocity as written
Angular velocity
is a vector physical quantity that characterizes the speed of rotation of a body.
The angular velocity vector is equal in magnitude to the angle of rotation of the body per unit time: ,
and is directed along the axis of rotation according to the gimlet rule, that is, in the direction into which a gimlet with a right-hand thread would be screwed in if it were rotating in the same direction.
Unit
angular velocity, adopted in the SI and GHS systems - radians per second. (Note: the radian, like any unit of measurement of angle, is physically dimensionless, so the physical dimension of angular velocity is simply [1/second]). In technology, revolutions per second are also used, much less often - degrees per second, degrees per second. Perhaps, revolutions per minute are used most often in technology - this comes from those times when the rotational speed of low-speed steam engines was determined simply “manually”, counting the number of revolutions per unit of time.
Vector of (instantaneous) velocity of any point of an (absolutely) rigid body rotating with angular velocity
, is determined by the formula:
Where
- radius vector to a given point from the origin located on the axis of rotation of the body, and square brackets indicate the vector product. The linear velocity (coinciding with the magnitude of the velocity vector) of a point at a certain distance (radius) from the axis of rotation can be calculated as follows: If other units of angles are used instead of radians, then in the last two formulas a multiplier will appear that is not equal to one.
- In the case of plane rotation, that is, when all velocity vectors of points of the body lie (always) in the same plane (“plane of rotation”), the angular velocity of the body is always perpendicular to this plane, and in fact - if the plane of rotation is known - can be replaced by a scalar - projection onto an axis orthogonal to the plane of rotation. In this case, the kinematics of rotation is greatly simplified, but in the general case, angular velocity can change direction in three-dimensional space over time, and such a simplified picture does not work.
- The derivative of angular velocity with respect to time is angular acceleration.
- Movement with a constant angular velocity vector is called uniform rotational motion (in this case, the angular acceleration is zero).
- The angular velocity (considered as a free vector) is the same in all inertial reference systems, however, in different inertial reference systems the axis or center of rotation of the same specific body at the same instant of time may differ (that is, the “point of application” of the angular speed).
- In the case of the movement of one single point in three-dimensional space, we can write an expression for the angular velocity of this point relative to the selected origin:
, where is the radius vector of the point (from the origin), is the speed of this point. — vector product, — scalar product of vectors. However, this formula does not uniquely determine the angular velocity (in the case of a single point, you can select other vectors that are suitable by definition; otherwise, arbitrarily, by choosing the direction of the axis of rotation), and for the general case (when the body includes more than one material point), this formula is not true for the angular velocity of the entire body (since it gives different ones for each point, and when an absolutely rigid body rotates, by definition, the angular velocity of its rotation is the only vector). With all this, in the two-dimensional case (the case of plane rotation) this formula is quite sufficient, unambiguous and correct, since in this particular case the direction of the rotation axis is clearly uniquely determined.
- In the case of uniform rotational motion (that is, motion with a constant angular velocity vector), the Cartesian coordinates of the points of a rotating body perform harmonic oscillations with an angular (cyclic) frequency equal to the magnitude of the angular velocity vector.
- When measuring angular velocity in revolutions per second (r/s), the magnitude of the angular velocity of uniform rotational motion coincides with the rotational frequency f, measured in hertz (Hz), that is, in such units. In the case of using the usual physical unit of angular velocity - radians per second - the module of angular velocity is related to the rotation frequency as follows: . Finally, when using degrees per second, the relationship to rotational speed will be: .